Autonomous Motion
Conference Paper
2015
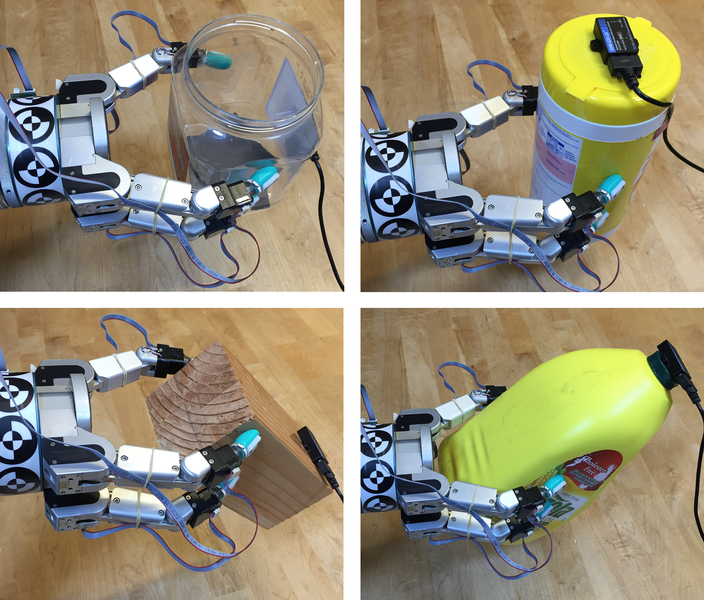
Force estimation and slip detection/classification for grip control using a biomimetic tactile sensor



| Author(s): | Su, Zhe and Hausman, Karol and Chebotar, Yevgen and Molchanov, Artem and Loeb, Gerald E and Sukhatme, Gaurav S and Schaal, Stefan |
| Book Title: | IEEE-RAS International Conference on Humanoid Robots (Humanoids) |
| Pages: | 297--303 |
| Year: | 2015 |
| Bibtex Type: | Conference Paper (inproceedings) |
| URL: | http://ieeexplore.ieee.org/xpls/abs_all.jsp?arnumber=7363558&tag=1 |
| Electronic Archiving: | grant_archive |
| Organization: | IEEE |
| Attachments: | |
BibTex
@inproceedings{su2015force,
title = {Force estimation and slip detection/classification for grip control using a biomimetic tactile sensor},
booktitle = {IEEE-RAS International Conference on Humanoid Robots (Humanoids)},
pages = {297--303},
organization = {IEEE},
year = {2015},
slug = {su2015force-f48108e4-e831-4481-ba33-38e6b0fc615f},
author = {Su, Zhe and Hausman, Karol and Chebotar, Yevgen and Molchanov, Artem and Loeb, Gerald E and Sukhatme, Gaurav S and Schaal, Stefan},
url = {http://ieeexplore.ieee.org/xpls/abs_all.jsp?arnumber=7363558&tag=1}
}