Events & Talks
Haptic Intelligence
IS Colloquium
Seungmoon Choi, Ph.D.
06-12-2019
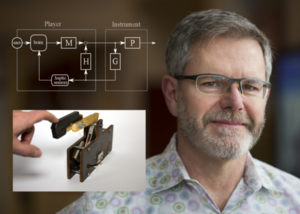
Automatic Authoring of Haptic Content
Providing rich and immersive physical experiences to users has become an essential component in many computer-interactive applications, where haptics plays a central role. However, as with other sensory modalities, modeling and rendering good haptic experiences with plausible physicality is a very demanding task in terms of the cost associated with modeling and authoring, not to mention the cost for development. No general and widely-used solutions exist yet for that; most designers and developers rely on their in-house programs, or even worse, manual coding. This talk will introduce the re...
Katherine J. Kuchenbecker

Haptic Intelligence
IS Colloquium
Jean-Louis Thonnard
25-09-2019
From Fingertip Skin Mechanics to Dexterous Object Manipulation
Fingertip skin friction plays a critical role during object manipulation. We will describe a simple and reliable method to estimate the fingertip static coefficient of friction (CF) continuously and quickly during object manipulation, and we will describe a global expression of the CF as a function of the normal force and fingertip moisture. Then we will show how skin hydration modifies the skin deformation dynamics during grip-like contacts. Certain motor behaviours observed during object manipulation could be explained by the effects of skin hydration. Then the biomechanics of the partial...
Katherine J. Kuchenbecker
David Gueorguiev

Haptic Intelligence
IS Colloquium
Ernest (Ted) Gomez, MD, MTR
11-09-2019
Haptic Intelligence in Surgical Learning - Lessons from Laparoscopy and Robotics
Surgery is a demanding activity that places a human life in the hands of others. However, innovations in minimally invasive surgery have physically separated surgeons' hands from their patients, creating the need for surgeons and their tools to develop both natural and artificial haptic intelligence. This lecture examines the essential role of haptic intelligence in skill development for laparoscopic and robotic surgery.
Katherine J. Kuchenbecker

Haptic Intelligence
IS Colloquium
Zhaoping Li
03-09-2019
A New Framework to Understanding Biological Vision
Visual attention selects a tiny amount of information that can be deeply processed by the brain, and gaze shifts bring the selected visual object to fovea, the center of the visual field, for better visual decoding or recognition of the selected objects. Therefore, central and peripheral vision should differ qualitatively in visual decoding, rather than just quantitatively in visual acuity.
Katherine J. Kuchenbecker

Haptic Intelligence
IS Colloquium
Gunhyuk Park
09-08-2019
Illusive and Realistic Vibrotactile Feedback: 2D Phantom Sensation and Vibrotactile Dimensional Reduction
Many hapticians have designed and implemented haptic effects to various user interactions. For several decades, hapticians have proved that the haptic feedback can improve multiple facets of user experience including task performance, analyzing and utilizing user perception, and substituting other sensory modalities. Among them, this talk introduces two representative rendering methods to provide vibrotactile effects to users: 2D phantom sensation that makes a user perceive illusive tactile perception by using multiple real vibrotactile actuators and vibrotactile dimensional reduction that ...
Katherine J. Kuchenbecker
Haptic Intelligence
Talk
Yasemin Vardar
04-06-2019
Career-Building Strategies for Postdocs and Ph.D. Students
Sign-Up! is a career-building program for female post-docs in the Max Planck Society. This program aims to prepare post-doctoral researchers for their future scientific careers by several interactive training sessions and networking activities. As a selected member of this program, I will summarize the workshops that I participated in this year. My talk will cover topics about success factors in scientific careers, career planning, professional communication and leadership, self-presentation, and research funding.
Katherine J. Kuchenbecker

Haptic Intelligence
IS Colloquium
Dr Antonia Tzemanaki
03-06-2019
Anthropomorphism in Surgical Robotics and Wearable Technologies
Over the past century, abdominal surgery has seen a rapid transition from open procedures to less invasive methods such as laparoscopy and robot-assisted minimally invasive surgery (R-A MIS), as they involve reduced blood loss, postoperative morbidity and length of hospital stay. Furthermore, R-A MIS has offered refined accuracy and more ergonomic instruments for surgeons, further minimising trauma to the patient. However, training surgeons in MIS procedures is becoming increasingly long and arduous, while commercially available robotic systems adopt a design similar to conventional laparos...
Katherine J. Kuchenbecker

Haptic Intelligence
IS Colloquium
Caroline G. L. Cao, Ph.D.
23-05-2019
Human Factors Research in Minimally Invasive Surgery
Health care is probably the last remaining unsafe critical system. A large proportion of reported medical errors occur in the hospital operating room (OR), a highly complex sociotechnical environment. As technology is being introduced into the OR faster than surgeons can learn to use them, surgical errors result from the unfamiliar instrumentation, increased motoric, perceptual and cognitive demands on the surgeons, as well as the lack of adequate training. Effective technology design for minimally invasive surgery requires an understanding of the system constraints of remote surgery, and t...
Katherine J. Kuchenbecker

Haptic Intelligence
Talk
Hojin Lee
25-02-2019
"Exploring” Haptics: Human-Machine Interactive Applications from Mid-Air Laser Haptics to Sensorimotor Skill Learning
Haptic technologies in both kinesthetic and tactile aspects benefit a brand-new opportunity to recent human-machine interactive applications. In this talk, I, who believe in that one of the essential role of a researcher is pioneering new insights and knowledge, will present my previous research topics about haptic technologies and human-machine interactive applications in two branches: laser-based mid-air haptics and sensorimotor skill learning. For the former branch, I will introduce our approach named indirect laser radiation and its application. Indirect laser radiation utilizes a laser...
Katherine J. Kuchenbecker

Haptic Intelligence
Talk
Ravali Gourishetti
25-02-2019
Virtual Reality Based Needle Insertion Simulation With Haptic Feedback: A Psychophysical Study
Needle insertion is the most essential skill in medical care; training has to be imparted not only for physicians but also for nurses and paramedics. In most needle insertion procedures, haptic feedback from the needle is the main stimulus that novices are to be trained in. For better patient safety, the classical methods of training the haptic skills have to be replaced with simulators based on new robotic and graphics technologies. The main objective of this work is to develop analytical models of needle insertion (a special case of epidural anesthesia) including the biomechanical and psy...
Katherine J. Kuchenbecker

Haptic Intelligence
Talk
Yongjae Yoo
14-02-2019
Perceptual and Affective Characteristics of Tactile Stimuli
With the advent of technology, tactile stimuli are adopted widely in many human-computer interactions. However, their perceptual and emotional characteristics are not much studied yet. In this talk, to help in understanding these characteristics, I will introduce my perception and emotion studies, as well as my future research plan. For perceptual characteristics, I will introduce an estimation method for perceived intensity of superimposed vibrations, verbal expressions for vibrotactile stimuli, and adjectival magnitude functions. Then, I will present a vibrotactile authoring tool that ut...
Katherine J. Kuchenbecker

Haptic Intelligence
Workshop
14-11-2018
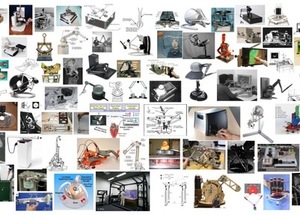
Haptipedia: An Interactive Database for Selecting, Ideating, and Learning About Grounded Force-Feedback Devices
We have developed Haptipedia, a large online gallery of haptic devices with an initial scope of 105 grounded force-feedback devices. Haptipedia was created to be a community resource that supports designers of all persuasions in ideating, finding, designing, and learning about kinesthetic haptic devices. In this AsiaHaptics workshop, you will learn how to use Haptipedia to address YOUR use case, and you can tell us how to make this resource more useful for you.
Hasti Seifi
Farimah Fazlollahi
Gunhyuk Park
Katherine J. Kuchenbecker
Haptic Intelligence
IS Colloquium
Veronica J. Santos
25-10-2018
Artificial Haptic Intelligence for Human-Machine Systems
The functionality of artificial manipulators could be enhanced by artificial “haptic intelligence” that enables the identification of object features via touch for semi-autonomous decision-making and/or display to a human operator. This could be especially useful when complementary sensory modalities, such as vision, are unavailable. I will highlight past and present work to enhance the functionality of artificial hands in human-machine systems. I will describe efforts to develop multimodal tactile sensor skins, and to teach robots how to haptically perceive salient geometric features such ...
Katherine J. Kuchenbecker
Adam Spiers

Haptic Intelligence
IS Colloquium
Veronica J. Santos
24-10-2018
Artificial Haptic Intelligence for Human-Machine Systems
The functionality of artificial manipulators could be enhanced by artificial “haptic intelligence” that enables the identification of object features via touch for semi-autonomous decision-making and/or display to a human operator. This could be especially useful when complementary sensory modalities, such as vision, are unavailable. I will highlight past and present work to enhance the functionality of artificial hands in human-machine systems. I will describe efforts to develop multimodal tactile sensor skins, and to teach robots how to haptically perceive salient geometric features such ...
Katherine J. Kuchenbecker

Haptic Intelligence
IS Colloquium
Chris Macnab
23-10-2018
Control Systems for a Surgical Robot on the Space Station
As part of a proposed design for a surgical robot on the space station, my research group has been asked to look at controls that can provide literally surgical precision. Due to excessive time delay, we envision a system with a local model being controlled by a surgeon while the remote system on the space station follows along in a safe manner. Two of the major design considerations that come into play for the low-level feedback loops on the remote side are 1) the harmonic drives in a robot will cause excessive vibrations in a micro-gravity environment unless active damping strategies ar...
Katherine J. Kuchenbecker

Haptic Intelligence
Talk
Gokhan Serhat
05-10-2018
FEA-based Design of Continuum Structures for Optimal Dynamic Properties
Continuum structures need to be designed for optimal vibrational characteristics in various fields. Recent developments in the finite element analysis (FEA) and numerical optimization methods allow creating more accurate computational models, which favors designing superior systems and reduces the need for experimentation. In this talk, I will present my work on FEA-based optimization of thin shell structures for improved dynamic properties where the focus will be on laminated composites. I will initially explain multi-objective optimization strategies for enhancing load-carrying and vibrat...
Katherine J. Kuchenbecker

Haptic Intelligence
Talk
Mariacarla Memeo
05-10-2018
Interactive and Effective Representation of Digital Content through Touch using Local Tactile Feedback
The increasing availability of on-line resources and the widespread practice of storing data over the internet arise the problem of their accessibility for visually impaired people.
A translation from the visual domain to the available modalities is therefore necessary to study if this access is somewhat possible. However, the translation of information from vision to touch is necessarily impaired due to the superiority of vision during the acquisition process. Yet, compromises exist as visual information can be simplified, sketched. A picture can become a map. An object can become a geom...
Katherine J. Kuchenbecker

Haptic Intelligence
IS Colloquium
Prof. Peter Pott
04-10-2018
Medical Robots with a Haptic Touch – First Experiences with the FLEXMIN System
The FLEXMIN haptic robotic system is a single-port tele-manipulator for robotic surgery in the small pelvis. Using a transanal approach it allows bi-manual tasks such as grasping, monopolar cutting, and suturing with a footprint of Ø 160 x 240 mm³. Forces up to 5 N in all direction can be applied easily. In addition to provide low latency and highly dynamic control over its movements, high-fidelity haptic feedback was realised using built-in force sensors, lightweight and friction-optimized kinematics as well as dedicated parallel kinematics input devices. After a brief description of the s...
Katherine J. Kuchenbecker

Haptic Intelligence
IS Colloquium
Prof. Dr. Cornelius Schwarz
02-07-2018
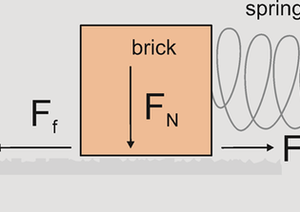
The Computational Skin. Tactile Perception based on Slip Movements.
Touch requires mechanical contact and is governed by the physics of friction. Frictional movements may convert the continuous 3D profile of textural objects into discrete and probabilistic movement events of the viscoelastic integument (skin/hair) called stick-slip movements (slips). This complex transformation may further be determined by the microanatomy and the active movements of the sensing organ. Thus, the integument may realize a computation, transforming the tactile world in a context dependent way - long before it even activates neurons. The possibility that the tactile world is pe...
Katherine J. Kuchenbecker
Haptic Intelligence
IS Colloquium
Yon Visell, PhD
20-06-2018
Haptic Engineering and Science at Multiple Scales
I will describe recent research in my lab on haptics and robotics. It has been a longstanding challenge to realize engineering systems that can match the amazing perceptual and motor feats of biological systems for touch, including the human hand. Some of the difficulties of meeting this objective can be traced to our limited understanding of the mechanics, and to the high dimensionality of the signals, and to the multiple length and time scales - physical regimes - involved. An additional source of richness and complication arises from the sensitive dependence of what we feel on what ...
Katherine J. Kuchenbecker

Haptic Intelligence
Workshop
13-06-2018
From Fingertip Mechanics to Tactile Sensation
It is well known that the dynamics of the interacting finger mediate the human tactile sensation of materials and textures but its contact dynamics also contribute to other aspects of human cognition such as proprioceptive perception and our capacity to dexterously manipulate objects. The broad range of perceptual phenomena stemming from finger mechanics makes it essential to develop further our understanding of the finger behavior during interaction and its perceptual consequences.
David Gueorguiev
Haptic Intelligence
Talk
Wenzhen Yuan
05-06-2018
Making Sense of the Physical World with High-Resolution Tactile Sensing
Why cannot the current robots act intelligently in the real-world environment? A major challenge lies in the lack of adequate tactile sensing technologies. Robots need tactile sensing to understand the physical environment, and detect the contact states during manipulation. Progress requires advances in the sensing hardware, but also advances in the software that can exploit the tactile signals. We developed a high-resolution tactile sensor, GelSight, which measures the geometry and traction field of the contact surface. For interpreting the high-resolution tactile signal, we utilize both t...
Katherine J. Kuchenbecker
Haptic Intelligence
IS Colloquium
Karon MacLean
28-05-2018
Making Haptics and its Design Accessible
Today’s advances in tactile sensing and wearable, IOT and context-aware computing are spurring new ideas about how to configure touch-centered interactions in terms of roles and utility, which in turn expose new technical and social design questions. But while haptic actuation, sensing and control are improving, incorporating them into a real-world design process is challenging and poses a major obstacle to adoption into everyday technology. Some classes of haptic devices, e.g., grounded force feedback, remain expensive and limited in range.
I’ll describe some recent highlights of an o...
Katherine J. Kuchenbecker

Haptic Intelligence
Talk
Preeya Khanna
19-04-2018
Brain-Machine Interfaces as Rehabilitative Tools for Motor Disorders
Actions constitute the way we interact with the world, making motor disabilities such as Parkinson’s disease and stroke devastating. The neurological correlates of the injured brain are challenging to study and correct given the adaptation, redundancy, and distributed nature of our motor system. However, recent studies have used increasingly sophisticated technology to sample from this distributed system, improving our understanding of neural patterns that support movement in healthy brains, or compromise movement in injured brains. One approach to translating these findings to into therapi...
Katherine J. Kuchenbecker
Haptic Intelligence
IS Colloquium
Jan Peters
13-04-2018
Machine Learning for Tactile Manipulation
Today’s robots have motor abilities and sensors that exceed those of humans in many ways: They move more accurately and faster; their sensors see more and at a higher precision and in contrast to humans they can accurately measure even the smallest forces and torques. Robot hands with three, four, or five fingers are commercially available, and, so are advanced dexterous arms. Indeed, modern motion-planning methods have rendered grasp trajectory generation a largely solved problem. Still, no robot to date matches the manipulation skills of industrial assembly workers despite that manipulati...
Katherine J. Kuchenbecker

Haptic Intelligence
Talk
Dr. Vincent Berenz
04-04-2018
A New Perspective on Usability Applied to Robotics
For many service robots, reactivity to changes in their surroundings is a must. However, developing software suitable for dynamic environments is difficult. Existing robotic middleware allows engineers to design behavior graphs by organizing communication between components. But because these graphs are structurally inflexible, they hardly support the development of complex reactive behavior. To address this limitation, we propose Playful, a software platform that applies reactive programming to the specification of robotic behavior. The front-end of Playful is a scripting language which is...
Katherine J. Kuchenbecker
Mayumi Mohan
Alexis Block
Haptic Intelligence
Talk
Dr. Adam Spiers
15-02-2018
Studying and Engineering Manipulation and Haptic Perception in Humans and Robots
This talk will focus on three topics of my research at Yale University, which centers on themes of human and robotic manipulation and haptic perception.
My major research undertaking at Yale has involved running a quantitative study of daily upper-limb prosthesis use in unilateral amputees. This work aims to better understand the techniques employed by long-term users of artificial arms and hands in order to inform future prosthetic device design and therapeutic interventions. While past attempts to quantify prosthesis-use have implemented either behavioral questionnaires or observations ...
Katherine J. Kuchenbecker

Haptic Intelligence
IS Colloquium
Prof. Christian Wallraven
13-02-2018
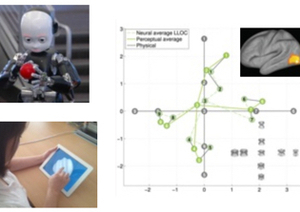
Vision and Haptics: a Cognitive and Computational Investigation About How We Perceive the World
Already starting at birth, humans integrate information from several sensory modalities in order to form a representation of the environment - such as when a baby explores, manipulates, and interacts with objects. The combination of visual and touch information is one of the most fundamental sensory integration processes, as touch information (such as body-relative size, shape, texture, material, temperature, and weight) can easily be linked to the visual image, thereby providing a grounding for later visual-only recognition. Previous research on such integration processes has so far mainly...
Katherine J. Kuchenbecker
Haptic Intelligence
Talk
Haliza Mat Husin
19-01-2018
Maternal Weight and Metabolism Related to Fetal Autonomic Nervous System
Background: Pre-pregnancy obesity and inadequate maternal weight gain during pregnancy can lead to adverse effects in the newborn but also to metabolic, cardiovascular and even neurological diseases in older ages of the offspring. Heart activity can be used as a proxy for the activity of the autonomic nervous system (ANS). The aim of this study is to evaluate the effect of pre-pregnancy weight, maternal weight gain and maternal metabolism on the ANS of the fetus in healthy pregnancies.
Katherine J. Kuchenbecker

Haptic Intelligence
IS Colloquium
Professor Brent Gillespie
20-11-2017
Extending the Reafference and Internal Model Principles to Support Physical Human-Robot Interaction
Relative to most robots and other machines, the human body is soft, its actuators compliant, and its control quite forgiving. But having a body that bends under load seems like a bad set-up for motor dexterity: the brain is faced with controlling more rather than fewer degrees of freedom. Undeniably, though, the soft body approach leads to superior solutions. Robots are putzes by comparison! While de-putzifying robots (perhaps by making them softer) is an endeavor I will discuss to some degree, in this talk I will focus on the design of robots intended to work cooperatively with humans, usi...
Katherine J. Kuchenbecker