

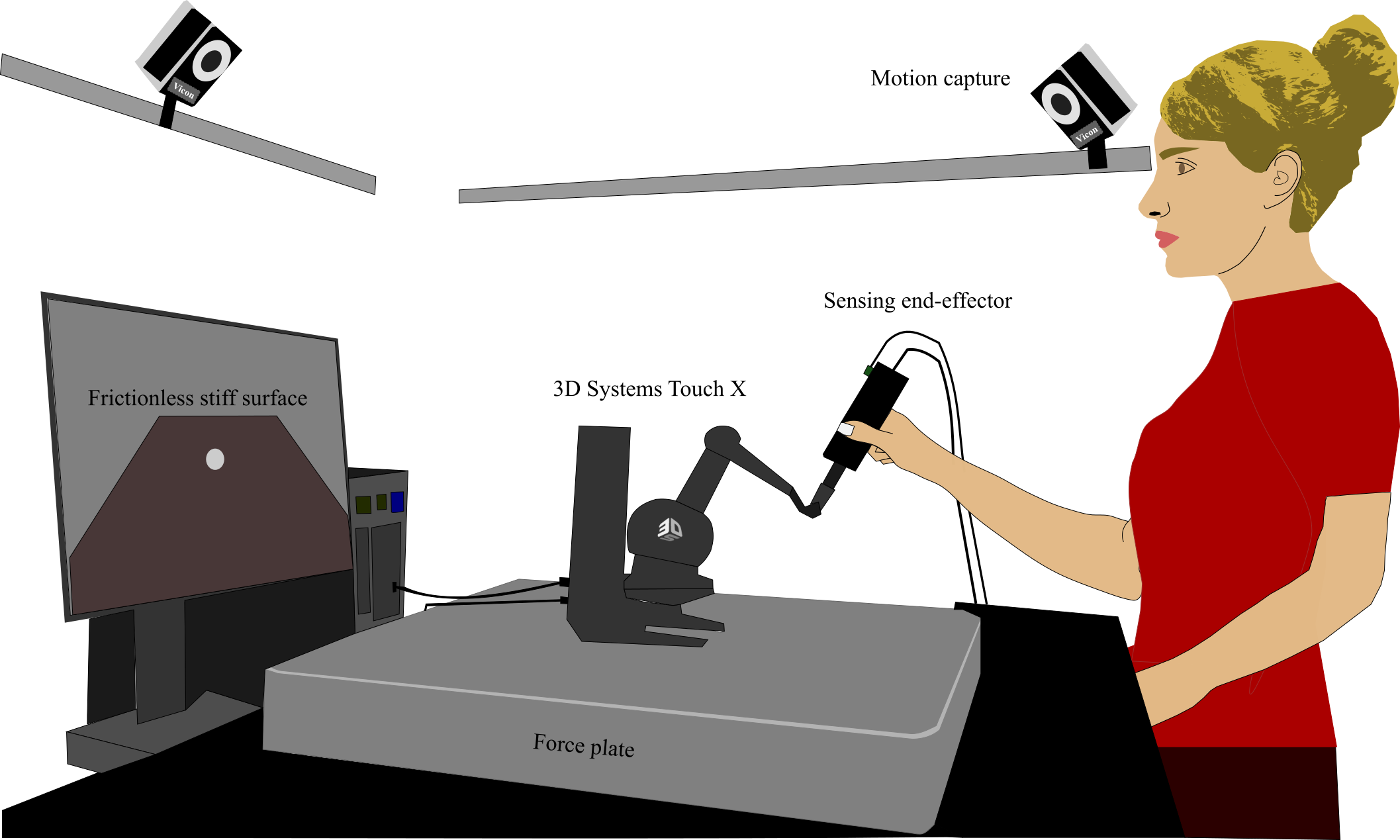
Even when they are not powered, grounded force-feedback haptic devices apply forces on the user's hand. These undesired forces stem from gravity, friction, and other nonidealities, and they still exist when the device renders a virtual environment. This demo invites users to compare how the 3D Systems Touch and Touch X devices render the same haptic content. Participants will try both devices in free space and touch a stiff frictionless virtual surface. After reflecting on the differences between the two devices, each person will receive a booklet showing the quantitative performance criteria we measured for both devices using Haptify, our benchmarking system.
| Author(s): | Farimah Fazlollahi and Katherine J. Kuchenbecker |
| Year: | 2022 |
| Month: | May |
| Project(s): | |
| Bibtex Type: | Miscellaneous (misc) |
| Address: | Hamburg, Germany |
| Electronic Archiving: | grant_archive |
| How Published: | Hands-on demonstration presented at EuroHaptics |
| State: | Published |
BibTex
@misc{Fazlollahi22-EHD-Comparing,
title = {Comparing Two Grounded Force-Feedback Haptic Devices},
abstract = {Even when they are not powered, grounded force-feedback haptic devices apply forces on the user's hand. These undesired forces stem from gravity, friction, and other nonidealities, and they still exist when the device renders a virtual environment. This demo invites users to compare how the 3D Systems Touch and Touch X devices render the same haptic content. Participants will try both devices in free space and touch a stiff frictionless virtual surface. After reflecting on the differences between the two devices, each person will receive a booklet showing the quantitative performance criteria we measured for both devices using Haptify, our benchmarking system.},
howpublished = {Hands-on demonstration presented at EuroHaptics},
address = {Hamburg, Germany},
month = may,
year = {2022},
slug = {fazlollahi22-ehd-comparing},
author = {Fazlollahi, Farimah and Kuchenbecker, Katherine J.},
month_numeric = {5}
}