Dynamic Locomotion
Ph.D. Thesis
2021
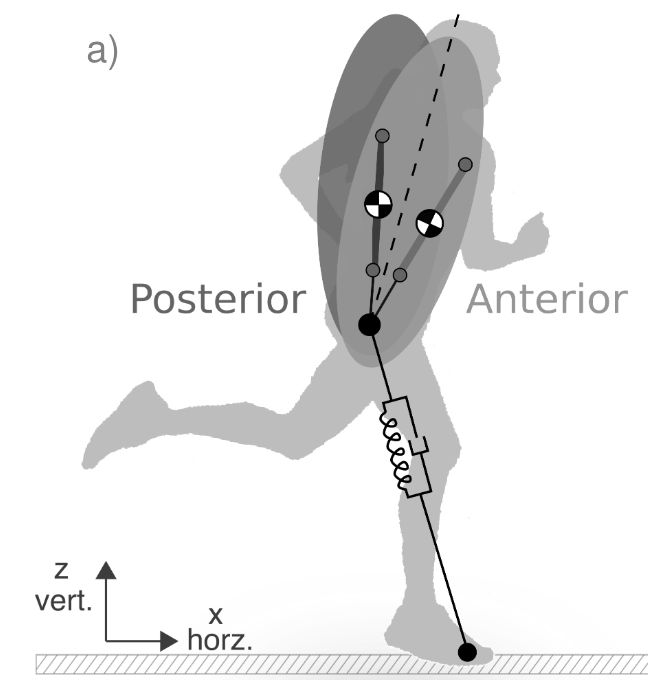
Control Mechanisms for Postural Stability and Trunk Motion in Bipedal Running. A Numerical Study for Humans, Avians, and Bipedal Robots

| Author(s): | Özge Drama |
| Year: | 2021 |
| Month: | May |
| Day: | 6 |
| Bibtex Type: | Ph.D. Thesis (phdthesis) |
| Address: | Stuttgart |
| Degree Type: | PhD |
| DOI: | 10.18419/opus-11573 |
| Electronic Archiving: | grant_archive |
| School: | Universität Stuttgart |
BibTex
@phdthesis{dramaPhD,
title = {Control Mechanisms for Postural Stability and Trunk Motion in Bipedal Running. A Numerical Study for Humans, Avians, and Bipedal Robots},
degree_type = {PhD},
school = {Universität Stuttgart},
address = {Stuttgart},
month = may,
year = {2021},
slug = {dramaphd},
author = {Drama, Özge},
month_numeric = {5}
}