Learning plastic matching of robot dynamics in closed-loop central pattern generators


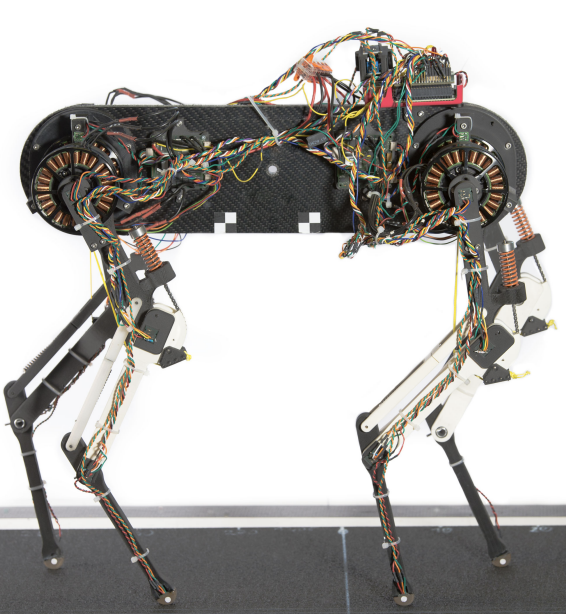
Animals achieve agile locomotion performance with reduced control effort and energy efficiency by leveraging compliance in their muscles and tendons. However, it is not known how biological locomotion controllers learn to leverage the intelligence embodied in their leg mechanics. Here we present a framework to match control patterns and mechanics based on the concept of short-term elasticity and long-term plasticity. Inspired by animals, we design a robot, Morti, with passive elastic legs. The quadruped robot Morti is controlled by a bioinspired closed-loop central pattern generator that is designed to elastically mitigate short-term perturbations using sparse contact feedback. By minimizing the amount of corrective feedback on the long term, Morti learns to match the controller to its mechanics and learns to walk within 1 h. By leveraging the advantages of its mechanics, Morti improves its energy efficiency by 42\% without explicit minimization in the cost function.
| Author(s): | Felix Ruppert and Alexander Badri-Spröwitz |
| Journal: | Nature Machine Intelligence |
| Volume: | 4 |
| Number (issue): | 7 |
| Pages: | 652--660 |
| Year: | 2022 |
| Month: | July |
| Bibtex Type: | Article (article) |
| DOI: | 10.1038/s42256-022-00505-4 |
| State: | Published |
| URL: | https://www.nature.com/articles/s42256-022-00505-4 |
| Electronic Archiving: | grant_archive |
| Supplement: | https://www.researchsquare.com/article/rs-1016591/latest.pdf |
| Links: | |
BibTex
@article{nmi22,
title = {Learning plastic matching of robot dynamics in closed-loop central pattern generators},
journal = {Nature Machine Intelligence},
abstract = {Animals achieve agile locomotion performance with reduced control effort and energy efficiency by leveraging compliance in their muscles and tendons. However, it is not known how biological locomotion controllers learn to leverage the intelligence embodied in their leg mechanics. Here we present a framework to match control patterns and mechanics based on the concept of short-term elasticity and long-term plasticity. Inspired by animals, we design a robot, Morti, with passive elastic legs. The quadruped robot Morti is controlled by a bioinspired closed-loop central pattern generator that is designed to elastically mitigate short-term perturbations using sparse contact feedback. By minimizing the amount of corrective feedback on the long term, Morti learns to match the controller to its mechanics and learns to walk within 1 h. By leveraging the advantages of its mechanics, Morti improves its energy efficiency by 42\% without explicit minimization in the cost function.},
volume = {4},
number = {7},
pages = {652--660},
month = jul,
year = {2022},
slug = {nmi21},
author = {Ruppert, Felix and Badri-Spr{\"o}witz, Alexander},
url = {https://www.nature.com/articles/s42256-022-00505-4},
month_numeric = {7}
}