Embodied Vision
Members
Publications
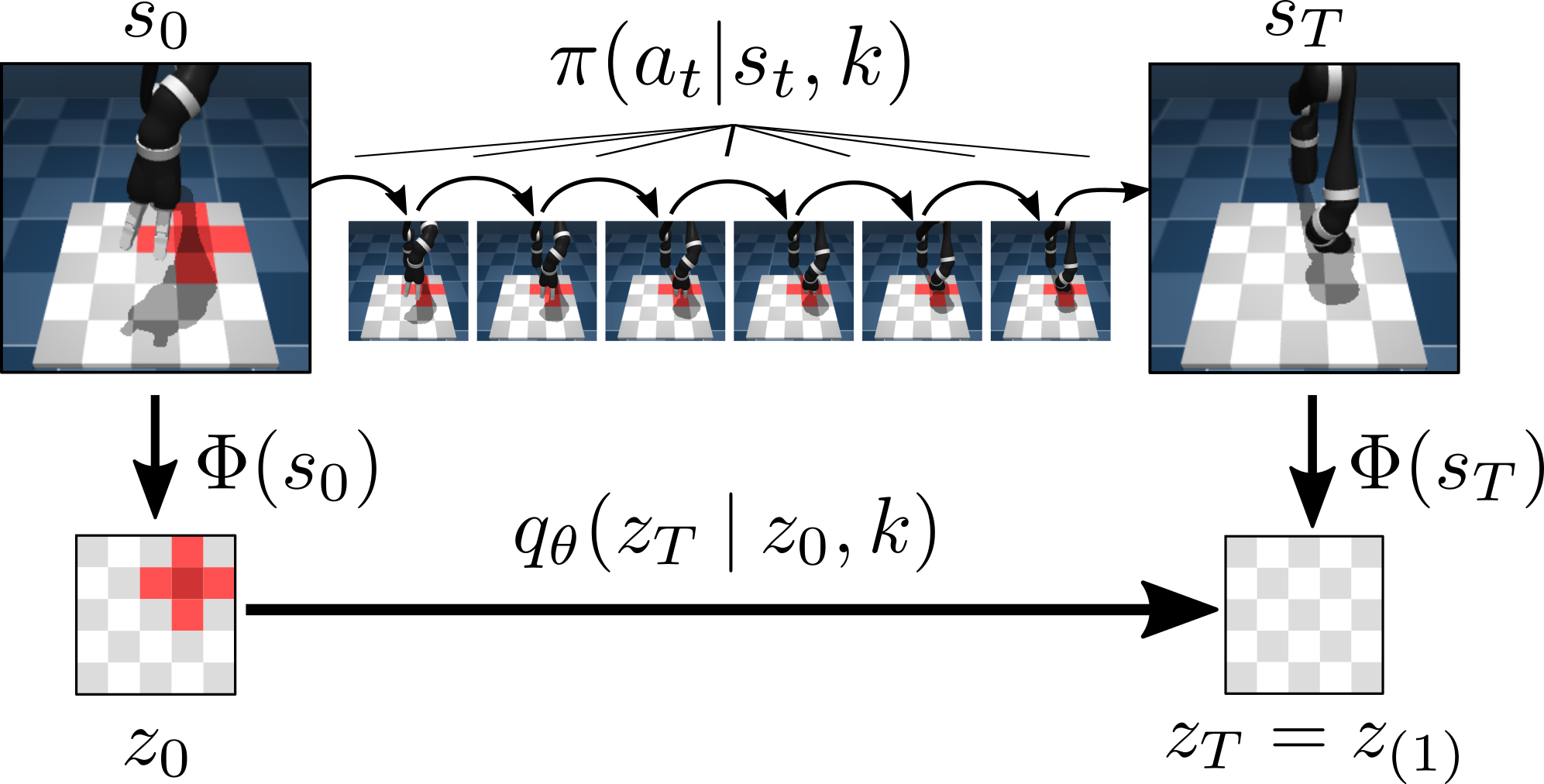
Two-level abstraction hierarchy of SEADS [ ].
].
Learning Action Abstractions and Forward Models for Planning and Control
In our work SEADS [], we learn a hierarchical representation for long-horizon tasks. Our approach learns a diverse set of motion control skills and a forward model which predicts the symbolic effect of skills for planning. After training, the forward model is used to plan sequences of learned skills. The planned skills are executed using their learned control policies.
n/a
Members


Publications
Embodied Vision
Conference Paper
Learning Temporally Extended Skills in Continuous Domains as Symbolic Actions for Planning
Achterhold, J., Krimmel, M., Stueckler, J.
In Proceedings of the 6th Conference on Robot Learning (CoRL), 205:225-236 , Proceedings of Machine Learning Research , 6th Annual Conference on Robot Learning (CoRL 2022) , 2022 (Published)
preprint
project website
URL
BibTeX