Movement Generation and Control
Dynamic Locomotion
Robotics
News
16-06-2020
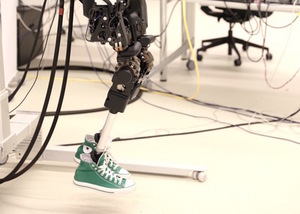
Four-legged robot makes research comparable worldwide
Solo 8 is a new research robot, developed as an open-source project in the German cities of Tübingen and Stuttgart. The dog-resembling, torque-controlled quadruped is capable of very dynamic movements. It is made entirely of 3D printed parts and off-the-shelf components, which makes it an easy to replicate platform ideal for fundamental research in legged locomotion and robotic education. The project aims to provide robotic research labs around the world with an easy-to-assemble legged robot kit that doesn’t break the bank. Additionally, software on Solo 8 is constantly improved and publicly available on GitHub. In return, the scientists of the Max Planck Institute for Intelligent Systems hope to exchange insights with other teams. Running experiments on the same platform creates comparative data – an ideal foundation for rapid progress in the research field of robotics.
Felix Grimminger
Avadesh Meduri
Majid Khadiv
Julian Viereck
Manuel Wüthrich
Maximilien Naveau
Vincent Berenz
Steve Heim
Felix Widmaier / Kloss
Jonathan Fiene
Alexander Badri-Spröwitz
Ludovic Righetti

Movement Generation and Control
News
20-11-2018
"Revolutionizing" the way robots move in complex environment
The Movement Generation and Control Group is an important partner of the new European Project Memmo
The EU funded Memmo project aims to revolutionize the way robots with arms and legs move by developing novel real-time methods for motion generation of complex robot, able to cope with the complexity of humanoid and other legged robots in realistic industrial and medical environments. The 4-year-project, led by the LAAS-CNRS in France, involves 10 different partners across Europe including the Movement Generation and Control Group at MPI-IS.
Ludovic Righetti
Andrea Del Prete
Ahmad Gazar
Autonomous Motion
Movement Generation and Control
News
07-06-2017
Awards for Two Master Theses
Cédric de Crousaz and Julian Viereck receive the ETH Medal for their outstanding Master Theses
Sebastian Trimpe
Ludovic Righetti
Julian Viereck
Alexander Herzog

Movement Generation and Control
Award
01-06-2017
Julian Viereck receives the ETH Medal for his outstanding master thesis on “Learning to Hop Using Guided Policy Search” (Handed out to < 2.5 % of all master theses per year at ETH Zurich). He did his master thesis at the Movement Generation and Control Group under the supervision of A. Herzog and L. Righetti.
Movement Generation and Control
Award
17-11-2016
The paper "A Convex Model of Humanoid Momentum Dynamics for Multi-Contact Motion Generation" by Brahayam Ponton, Alexander Herzog, Stefan Schaal and Ludovic Righetti was Finalist for the Best Interactive Session Award at the 2016 IEEE-RAS International Conference on Humanoid Robotics. 10 finalists out of 283 submitted / 186 accepted papers.
Movement Generation and Control
Award
27-10-2016
The paper "Stepping Stabilization Using a Combination of DCM Tracking and Step Adjustment" by Majid Khadiv, Sébastien Kleff, Alexander Herzog, Ali Moosavian, Stefan Schaal and Ludovic Righetti was Finalist for the Best Paper Award at the 4th RSI International Conference on Robotics and Mechatronics (ICROM).
Autonomous Motion
Movement Generation and Control
News
18-05-2016
Heinz Maier-Leibnitz-Prize 2016 for Ludovic Righetti
Medal-Marathon for Robotics Researcher
Tübingen – Stockholm – Berlin – Stockholm – Tübingen; Ludovic Righetti receives within 24 hours two renowned prizes for young researchers for his outstanding science on movements of robots
Ludovic Righetti

Autonomous Motion
Movement Generation and Control
Award
31-03-2016
Ludovic Righetti receives the Heinz Maier-Leibnitz Prize 2016. It is awarded by the German Research Foundation (DFG) and the German Federal Ministry of Education and Research. It is considered the most prestigious award in Germany for early career researchers across all disciplines who have established an independent scientific career since having gained their doctorates.
Autonomous Motion
Movement Generation and Control
News
05-02-2016
2016 RAS Early Career Award (Academic)
for Ludovic Righetti, Group Leader AM Department
recognizing "his contributions to the theory of, and experiments in, robot locomotion and manipulation".
Ludovic Righetti
Autonomous Motion
Movement Generation and Control
Award
05-02-2016
Ludovic Righetti receives the IEEE-RAS Early Career Award (Academic) for "his contributions to the theory of, and experiments in, robot locomotion and manipulation". It is awarded by the IEEE Robotics and Automation Society to “individuals in the early stage of their career who have made an identifiable contribution or contributions which have had a major impact on the robotics and/or automation fields”.

Autonomous Motion
Smart Nanoplasmonics
Movement Generation and Control
News
20-01-2015
Scientists at the MPI for Intelligent Systems receive more than 3 Million Euro ERC Starting Grants
Intelligent Systems Research: Spanning the Length Scale
Stuttgart / Tübingen. Five years of basic research is secured: The physicist Dr. Laura Na Liu and the computer scientist Dr. Ludovic Righetti, both from the Max Planck Institute for Intelligent Systems, receive an ERC Starting Grant of 1,5 Million Euro, respectively. Prof. Jan Peters, head of the robot learning group at the institute (while mainly active as full professor at the TU Darmstadt) will invest part of his ERC starting grant into his research group at the institute. The researchers have won against 3.273 applicants - only 10 per cent of the submitted project appraisals receive the requested award, granted by the European Research Council (ERC).
Ludovic Righetti
Jan Peters
Laura Na Liu
