A Versatile Jellyfish-Like Robotic Platform for Effective Underwater Propulsion and Manipulation


- Doctoral Researcher

- Research Engineer

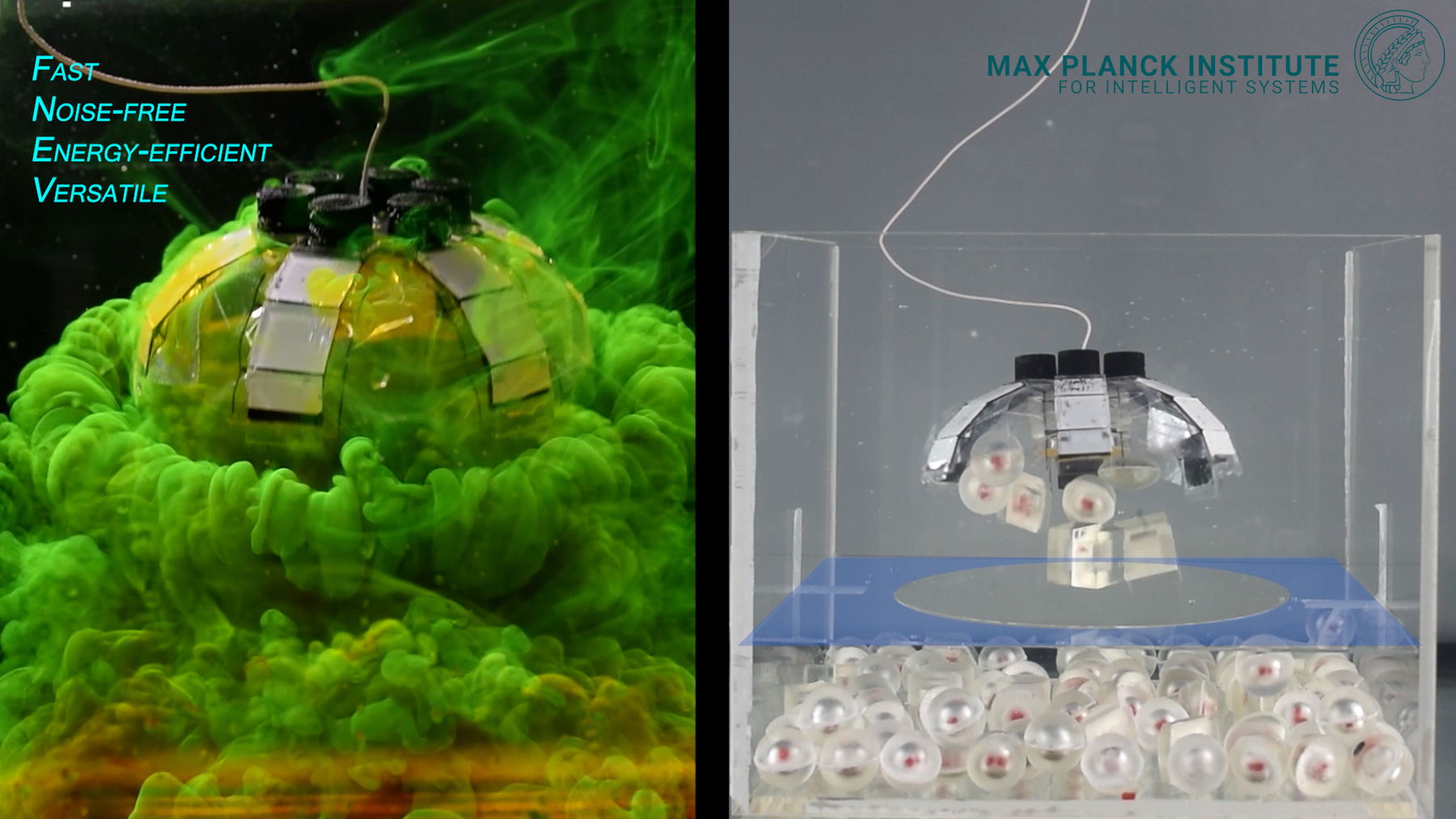
Underwater devices are critical for environmental applications. However, existing prototypes typically use bulky, noisy actuators and limited configurations. Consequently, they struggle to ensure noise-free and gentle interactions with underwater species when realizing practical functions. Therefore, we developed a jellyfish-like robotic platform enabled by a synergy of electrohydraulic actuators and a hybrid structure of rigid and soft components. Our 16-cm-diameter noise-free prototype could control the fluid flow to propel while manipulating objects to be kept beneath its body without physical contact, thereby enabling safer interactions. Its against-gravity speed was up to 6.1 cm/s, substantially quicker than other examples in literature, while only requiring a low input power of around 100 mW. Moreover, using the platform, we demonstrated contact-based object manipulation, fluidic mixing, shape adaptation, steering, wireless swimming, and cooperation of two to three robots. This study introduces a versatile jellyfish-like robotic platform with a wide range of functions for diverse applications.
| Author(s): | Tianlu Wang and Hyeong-Joon Joo and Shanyuan Song and Wenqi Hu and Christoph Keplinger and Metin Sitti |
| Journal: | Science Advances |
| Volume: | 9 |
| Number (issue): | 15 |
| Year: | 2023 |
| Month: | April |
| Publisher: | American Association for the Advancement of Science |
| Project(s): | |
| Bibtex Type: | Article (article) |
| DOI: | doi.org/10.1126/sciadv.adg0292 |
| State: | Published |
| URL: | https://www.science.org/doi/epdf/10.1126/sciadv.adg0292 |
| Article Number: | adg0292 |
| Electronic Archiving: | grant_archive |
| Note: | Tianlu Wang and Hyeong-Joon Joo contributed equally to this work. |
| Links: | |
BibTex
@article{Joo23-SCIA-Jellyfish,
title = {A Versatile Jellyfish-Like Robotic Platform for Effective Underwater Propulsion and Manipulation},
journal = {Science Advances},
abstract = {Underwater devices are critical for environmental applications. However, existing prototypes typically use bulky, noisy actuators and limited configurations. Consequently, they struggle to ensure noise-free and gentle interactions with underwater species when realizing practical functions. Therefore, we developed a jellyfish-like robotic platform enabled by a synergy of electrohydraulic actuators and a hybrid structure of rigid and soft components. Our 16-cm-diameter noise-free prototype could control the fluid flow to propel while manipulating objects to be kept beneath its body without physical contact, thereby enabling safer interactions. Its against-gravity speed was up to 6.1 cm/s, substantially quicker than other examples in literature, while only requiring a low input power of around 100 mW. Moreover, using the platform, we demonstrated contact-based object manipulation, fluidic mixing, shape adaptation, steering, wireless swimming, and cooperation of two to three robots. This study introduces a versatile jellyfish-like robotic platform with a wide range of functions for diverse applications.},
volume = {9},
number = {15},
publisher = {American Association for the Advancement of Science},
month = apr,
year = {2023},
note = {Tianlu Wang and Hyeong-Joon Joo contributed equally to this work.},
slug = {joo23-scia-jellyfish},
author = {Wang, Tianlu and Joo, Hyeong-Joon and Song, Shanyuan and Hu, Wenqi and Keplinger, Christoph and Sitti, Metin},
url = {https://www.science.org/doi/epdf/10.1126/sciadv.adg0292},
month_numeric = {4}
}