An Open-Source Modular Treadmill for Dynamic Force Measurement with Load Dependant Range Adjustment
2023
Unpublished
dlg
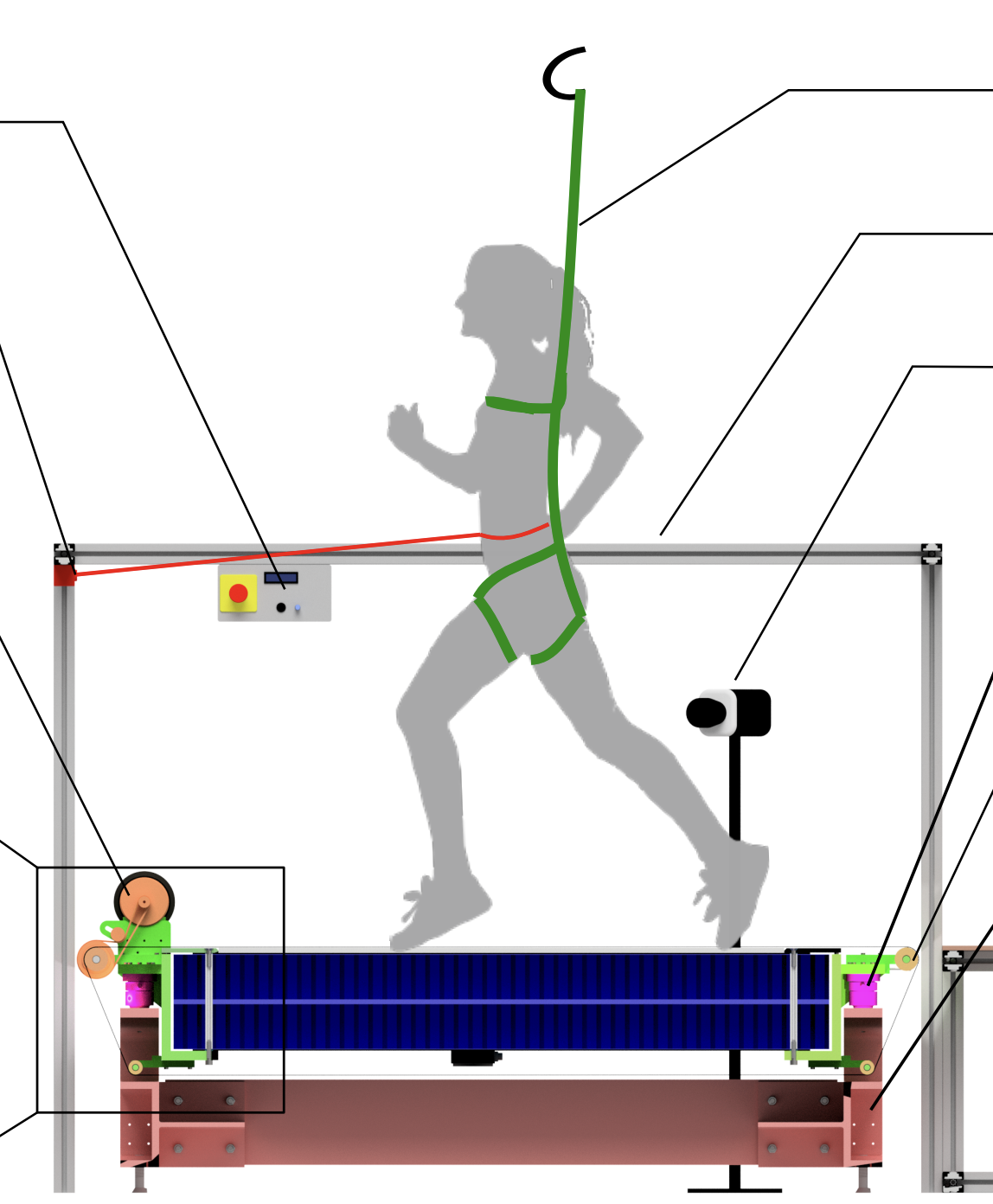
Ground reaction force sensing is one of the key components of gait analysis in legged locomotion research. To measure continuous force data during locomotion, we present a novel compound instrumented treadmill design. The treadmill is 1.7 m long, with a natural frequency of 170 Hz and an adjustable range that can be used for humans and small robots alike. Here, we present the treadmill’s design methodology and characterize it in its natural frequency, noise behavior and real-life performance. Additionally, we apply an ISO 376 norm conform calibration procedure for all spatial force directions and center of pressure position. We achieve a force accuracy of ≤ 5.6 N for the ground reaction forces and ≤ 13 mm in center of pressure position.
| Author(s): | Alborz Sarvestani and Felix Ruppert and Alexander Badri-Spröwitz |
| Year: | 2023 |
| Department(s): | Dynamic Locomotion |
| Bibtex Type: | Unpublished (unpublished) |
| Paper Type: | Journal |
| DOI: | https://doi.org/10.48550/arXiv.2303.14482 |
| State: | Submitted |
| URL: | https://arxiv.org/abs/2303.14482 |
| Links: |
arXiv
|
|
BibTex @unpublished{2023-treadmill,
title = {An Open-Source Modular Treadmill for Dynamic Force Measurement with Load Dependant Range Adjustment},
author = {Sarvestani, Alborz and Ruppert, Felix and Badri-Spr{\"o}witz, Alexander},
year = {2023},
doi = {https://doi.org/10.48550/arXiv.2303.14482},
url = {https://arxiv.org/abs/2303.14482}
}
|
|