Electrohydraulic Musculoskeletal Robotic Leg for Agile, Adaptive, yet Energy-Efficient Locomotion
2024
Article
rm
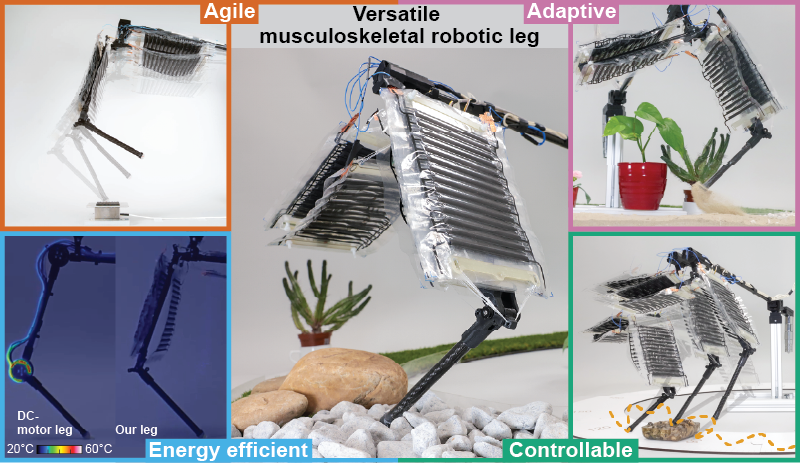
Robotic locomotion in unstructured terrain demands an agile, adaptive, and energy-efficient architecture. To traverse such terrains, legged robots use rigid electromagnetic motors and sensorized drivetrains to adapt to the environment actively. These systems struggle to compete with animals that excel through their agile and effortless motion in natural environments. We propose a bio-inspired musculoskeletal leg architecture driven by antagonistic pairs of electrohydraulic artificial muscles. Our leg is mounted on a boom arm and can adaptively hop on varying terrain in an energy-efficient yet agile manner. It can also detect obstacles through capacitive self-sensing. The leg performs powerful and agile gait motions beyond 5 Hz and high jumps up to 40 % of the leg height. Our leg’s tunable stiffness and inherent adaptability allow it to hop over grass, sand, gravel, pebbles, and large rocks using only open-loop force control. The electrohydraulic leg features a low cost of transport (0.73), and while squatting, it consumes only a fraction of the energy (1.2 %) compared to its conventional electromagnetic counterpart. Its agile, adaptive, and energy-efficient properties would open a roadmap toward a new class of musculoskeletal robots for versatile locomotion and operation in unstructured natural environments.
| Author(s): | Buchner, Thomas J. K. and Fukushima, Toshihiko and Kazemipour, Amirhossein and Gravert, Stephan-Daniel and Prairie, Manon and Romanescu, Pascal and Arm, Philip and Zhang, Yu and Wang, Xingrui and Zhang, Steven L. and Walter, Johannes and Keplinger, Christoph and Katzschmann, Robert K. |
| Journal: | Nature Communications |
| Volume: | 15 |
| Number (issue): | 1 |
| Year: | 2024 |
| Month: | September |
| Department(s): | Robotic Materials |
| Bibtex Type: | Article (article) |
| Paper Type: | Journal |
| Article Number: | 7634 |
| DOI: | 10.1038/s41467-024-51568-3 |
| State: | Published |
| URL: | https://www.nature.com/articles/s41467-024-51568-3 |
| Links: |
Press release
Video (overview) Video (technical description) Article in pdf |
| Video: | |
| Video: | |
| Attachments: | |
|
BibTex @article{Fukushima24-NC-Leg,
title = {Electrohydraulic Musculoskeletal Robotic Leg for Agile, Adaptive, yet Energy-Efficient Locomotion},
author = {Buchner, Thomas J. K. and Fukushima, Toshihiko and Kazemipour, Amirhossein and Gravert, Stephan-Daniel and Prairie, Manon and Romanescu, Pascal and Arm, Philip and Zhang, Yu and Wang, Xingrui and Zhang, Steven L. and Walter, Johannes and Keplinger, Christoph and Katzschmann, Robert K.},
journal = {Nature Communications},
volume = {15},
number = {1},
month = sep,
year = {2024},
doi = {10.1038/s41467-024-51568-3},
url = {https://www.nature.com/articles/s41467-024-51568-3},
month_numeric = {9}
}
|
|