Soft Electrohydraulic Actuators for Origami Inspired Shape-Changing Interfaces

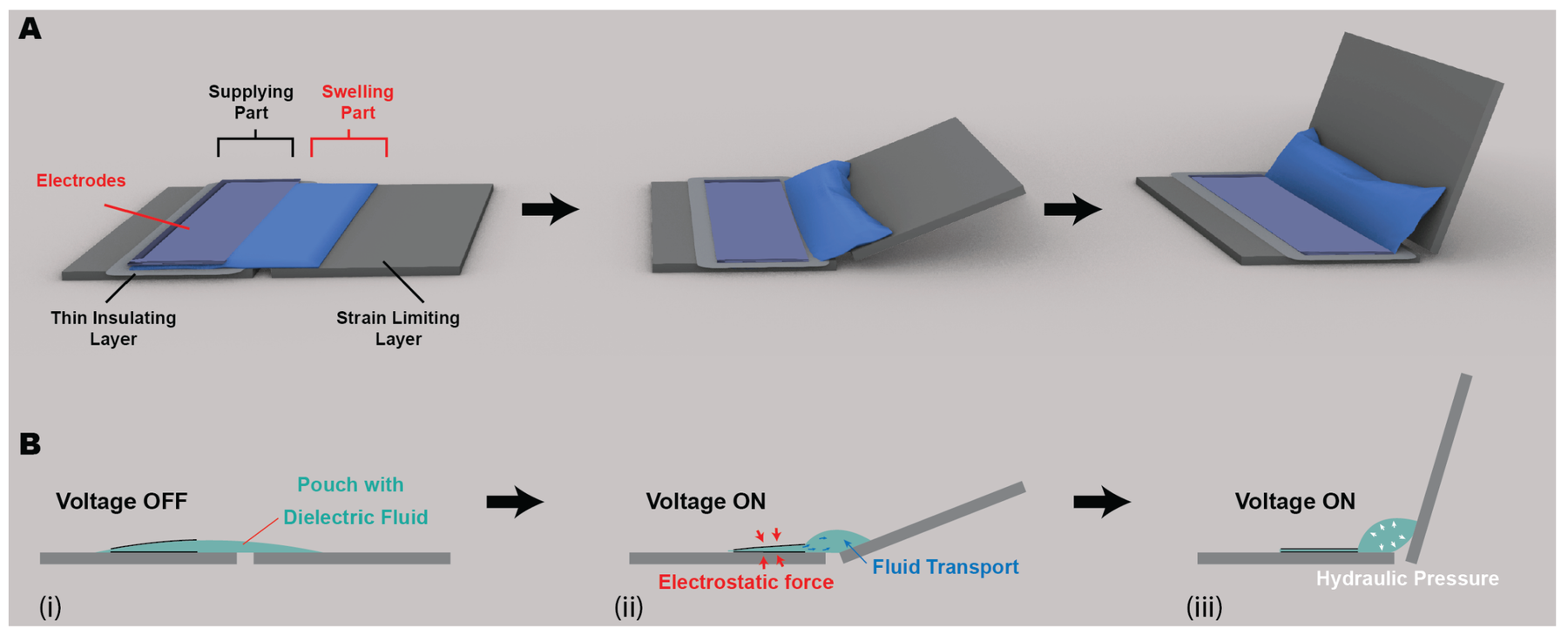
In this paper, we present electrohydraulic actuators for origami inspired shape-changing interfaces, which are capable of producing sharp hinge-like bends. These compliant actuators generate an immediate hydraulic force upon electrostatic activation without an external fluid supply source, are silent and fast in operation, and can be fabricated with commodity materials. We experimentally investigate the characteristics of these actuators and present application scenarios for actuating existing objects as well as origami folds. In addition, we present a software tool for the design and fabrication of shape-changing interfaces using these electrohydraulic actuators. We also discuss how this work opens avenues for other possible applications in Human Computer Interaction (HCI).
| Author(s): | Purnendu and Eric Acome and Christoph Keplinger and Mark D. Gross and Carson Bruns and Daniel Leithinger |
| Book Title: | CHI EA ’21: Extended Abstracts of the 2021 CHI Conference on Human Factors in Computing Systems |
| Pages: | 377 |
| Year: | 2021 |
| Month: | May |
| Day: | 8 |
| Publisher: | ACM |
| Bibtex Type: | Conference Paper (inproceedings) |
| Address: | New York, NY |
| DOI: | 10.1145/3411763.3451590 |
| Event Name: | Conference on Human Factors in Computing Systems (CHI 2021) |
| Event Place: | Yokohama |
| State: | Published |
| URL: | https://dl.acm.org/doi/abs/10.1145/3411763.3451590 |
| Electronic Archiving: | grant_archive |
| ISBN: | 978-1-4503-8095-9 |
BibTex
@inproceedings{Keplinger21-CHFCS-Soft,
title = {Soft Electrohydraulic Actuators for Origami Inspired Shape-Changing Interfaces},
booktitle = {CHI EA '21: Extended Abstracts of the 2021 CHI Conference on Human Factors in Computing Systems},
abstract = {In this paper, we present electrohydraulic actuators for origami inspired shape-changing interfaces, which are capable of producing sharp hinge-like bends. These compliant actuators generate an immediate hydraulic force upon electrostatic activation without an external fluid supply source, are silent and fast in operation, and can be fabricated with commodity materials. We experimentally investigate the characteristics of these actuators and present application scenarios for actuating existing objects as well as origami folds. In addition, we present a software tool for the design and fabrication of shape-changing interfaces using these electrohydraulic actuators. We also discuss how this work opens avenues for other possible applications in Human Computer Interaction (HCI).},
pages = {377},
publisher = {ACM},
address = {New York, NY},
month = may,
year = {2021},
slug = {keplinger21-chfcs-soft},
author = {Purnendu and Acome, Eric and Keplinger, Christoph and Gross, Mark D. and Bruns, Carson and Leithinger, Daniel},
url = {https://dl.acm.org/doi/abs/10.1145/3411763.3451590},
month_numeric = {5}
}