Bioinspired and wearable robotics
A soft, fast and versatile electrohydraulic gripper with capacitive object size detection
A versatile jellyfish-like robotic platform for effective underwater propulsion and manipulation
Electrohydraulic musculoskeletal robotic leg for agile, adaptive, yet energy-efficient locomotion
A multifunctional soft robotic shape display with high-speed actuation, sensing, and control
Cutaneous Electrohydraulic (CUTE) Wearable Devices for Pleasant Broad-Bandwidth Haptic Cues
Research Overview

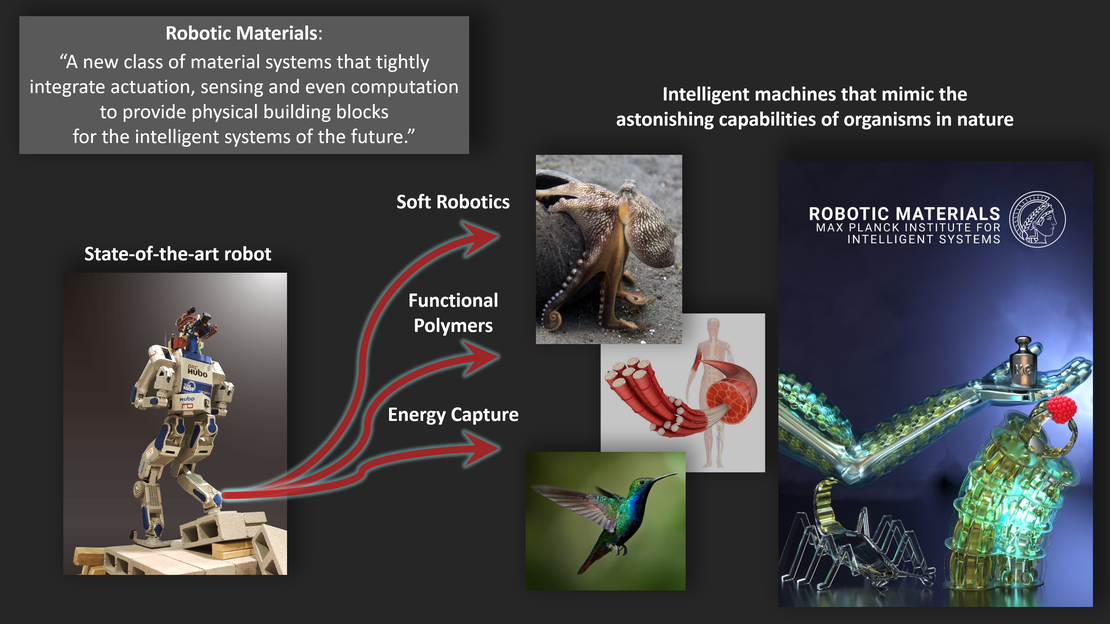
The Robotic Materials Department aims to fundamentally challenge current limitations of robotic hardware, using an interdisciplinary approach that synergizes concepts from soft matter physics and chemistry with advanced engineering technologies, to devise robotic materials capable of creating intelligent machines that mimic the astonishing versatility and adaptability of organisms in nature. Our department investigates three broad areas of research including soft robotics, functional materials and energy capture, with the current focus on soft electrostatic actuator systems based on multi-phase, multi-layer dielectrics. We aim to rapidly bring our discoveries from fundamental materials science, all the way to the development of bioinspired and wearable robotic systems.
Robots today rely on rigid components and electric motors based on metal and magnets, making them heavy, unsafe near humans, expensive, and ill-suited for unpredictable environments. Nature, in contrast, makes extensive use of soft materials, such as muscle and skin, and has produced organisms that drastically outperform robots in terms of agility, dexterity, and adaptability. The current research focus of our department is to create new classes of actuators that replicate the sweeping success of biological muscles – a masterpiece of evolution featuring astonishing all-around actuation performance, the ability to self-heal after damage, and seamless integration with distributed sensing.
Soft actuators traditionally use pneumatics to induce shape change, which are easy to implement, but typically require an external pump, making their operation inefficient, noisy, and realizing fully-untethered agile robots a challenging endeavor. Intrigued by an opportunity brought forth centuries ago, we explore a promising alternative – electrostatics: In the 1740s, Benjamin Franklin and Andrew Gordon created the first electric motors, driven by electrostatics; it failed to take flight. Based on scientific insights from Nikola Tesla, the editors of Scientific American, in March 1934, wrote that “The trouble with such machines has always been that air was not a sufficient insulator to prevent sparks… For this reason, the development of the electric age had to await the discovery that electricity could be generated in another way, by moving a conductor in the field of a magnet”; Nikola Tesla himself predicted that “when new types (of electrostatic transducers) are developed and sufficiently improved, a great future will be assured to them.” The last century saw developments in advanced fabrication technologies and discoveries of entirely new generations of previously unknown dielectric solids and fluids, with orders of magnitude higher resistance to electric fields than air – the great future of electrostatic actuators, motors and generators that Tesla described, nearly a hundred years ago, is NOW.
Our department seizes this opportunity by using our expertise in soft matter physics and materials science, to unravel new fundamental knowledge at the forefront of soft electrostatic actuator research, so as to create new technologies for advanced robotic systems. We use multi-phase, multi-layered dielectrics to pioneer a new class of soft electrostatic systems, that harness concepts from fluid mechanics to achieve an unprecedented combination of high-performance actuation and versatility. We synergistically interface these soft electrostatic actuators with other types of robotic materials to create a new generation of life-like robotic systems [Rothemund et al., Nature Materials, 2021] [![]() ].
].
Research Highlights. Since the department was established in 2020, we have adopted a research strategy that focuses on publishing high quality papers, each of which aims to make a substantial contribution to advancing the field. Research highlights over the past few years span from advances in materials to robotics: We proposed a biodegradable materials system for high-performance artificial muscles [Rumley et al., Science Advances, 2023] [![]() ], introduced a class of electrically-actuated robotic modules as building blocks for rapidly reconfigurable and highly agile robotic systems [Yoder, Rumley et al., Science Robotics, 2024] [
], introduced a class of electrically-actuated robotic modules as building blocks for rapidly reconfigurable and highly agile robotic systems [Yoder, Rumley et al., Science Robotics, 2024] [![]() ], leap-frogged the agility, adaptivity and efficiency of robotic limbs by proposing a bioinspired architecture for musculoskeletal legs [Buchner, Fukushima et al., Nature Communications, 2024, with CLS faculty] [
], leap-frogged the agility, adaptivity and efficiency of robotic limbs by proposing a bioinspired architecture for musculoskeletal legs [Buchner, Fukushima et al., Nature Communications, 2024, with CLS faculty] [![]() ], created swimming robots that are noise-free, efficient and fast, which are capable of nimble underwater operations [Wang, Joo et al., Science Advances, 2023, with PI Department] [
], created swimming robots that are noise-free, efficient and fast, which are capable of nimble underwater operations [Wang, Joo et al., Science Advances, 2023, with PI Department] [![]() ], built multifunctional soft robotic shape displays with high-speed actuation, sensing, and control [Johnson et al., Nature Communications, 2023] [
], built multifunctional soft robotic shape displays with high-speed actuation, sensing, and control [Johnson et al., Nature Communications, 2023] [![]() ], and developed a system architecture for compact wearable devices that deliver salient and pleasant broad-bandwidth haptic cues [Sanchez et al., Advanced Science, 2024, with HI Department] [
], and developed a system architecture for compact wearable devices that deliver salient and pleasant broad-bandwidth haptic cues [Sanchez et al., Advanced Science, 2024, with HI Department] [![]() ]. These scientific works opened up numerous opportunities for public engagement, including features in news articles and on TV shows, as well as outreach activities on our campus.
]. These scientific works opened up numerous opportunities for public engagement, including features in news articles and on TV shows, as well as outreach activities on our campus.
Future Focus. The department is currently exploring an entirely new class of linearly contractile, electrically driven artificial muscles, that promises to achieve a completely new level of actuation performance. In parallel, we are developing composite materials systems for soft electrohydraulic actuators that generate extremely high Maxwell stresses, that avoid charge accumulation at liquid-solid interfaces, and that shield actuators from environmental influences. To guide our work on pushing the limits of actuator performance, we are using theoretical and experimental approaches to develop a deep understanding of the physics and mechanics at play in soft electrostatic transducers based on multi-phase, multi-layered dielectrics. Discoveries from our fundamental research on actuators and generators will work as foundational blocks to create new types of robotic systems as well as technologies to capture energy from renewable sources. To realize agile and fully untethered bioinspired and wearable robots, we are both developing a framework to study and improve energy conversion efficiency of actuators, and designing portable and efficient electrical driving and control architectures. We are also working on new classes of human machine interfaces and soft display technologies, as well as on different types of wearable assistive devices, including a major project in collaboration with Fraunhofer IPA, supported by a €2 million grant, to work on the development of functional exosuits driven by electrostatic actuators.
Team and Facilities. To foster a creative environment that nurtures cutting-edge research, we have assembled a diverse and inclusive team and designed world-class laboratory facilities. We have humidity- and temperature-controlled physics and chemistry labs, and a high-grade laminar-flow room to provide a particles-free environment; we have a full suite of mechanical, dielectric and morphological characterization equipment and state-of-the art tools for high-speed videography. We are also constructing a high-precision, customizable sheet-based printing, coating, laminating, and drying system, ideal for fabricating a wide variety of electroactive multi-layer structures and functional devices. The department is a champion of diversity and inclusion, as we understand that embracing it is beyond just a moral imperative – it also is a catalyst for scientific excellence; this understanding motivated our recent perspective article [Macari et al., Science Robotics, 2024] [![]() ]. As such, we have a diverse team consisting of scientists that come from 16 nationalities, with about half the team female. Powered by this dynamic and creative team, the Robotic Materials Department is driven to realize visionary robotic systems, that will benefit humankind.
]. As such, we have a diverse team consisting of scientists that come from 16 nationalities, with about half the team female. Powered by this dynamic and creative team, the Robotic Materials Department is driven to realize visionary robotic systems, that will benefit humankind.