Autonomous Robotic Manipulation
Modeling Top-Down Saliency for Visual Object Search
Interactive Perception
State Estimation and Sensor Fusion for the Control of Legged Robots
Probabilistic Object and Manipulator Tracking
Global Object Shape Reconstruction by Fusing Visual and Tactile Data
Robot Arm Pose Estimation as a Learning Problem
Learning to Grasp from Big Data
Gaussian Filtering as Variational Inference
Template-Based Learning of Model Free Grasping
Associative Skill Memories
Real-Time Perception meets Reactive Motion Generation
Autonomous Robotic Manipulation
Learning Coupling Terms of Movement Primitives
State Estimation and Sensor Fusion for the Control of Legged Robots
Inverse Optimal Control
Motion Optimization
Optimal Control for Legged Robots
Movement Representation for Reactive Behavior
Associative Skill Memories
Real-Time Perception meets Reactive Motion Generation
Bodies in Medicine
Body shape and movement are related to human health. Using our 3D models of body shape we analyze movement and shape to create non-invasive and deployable methods for analyzing human health.
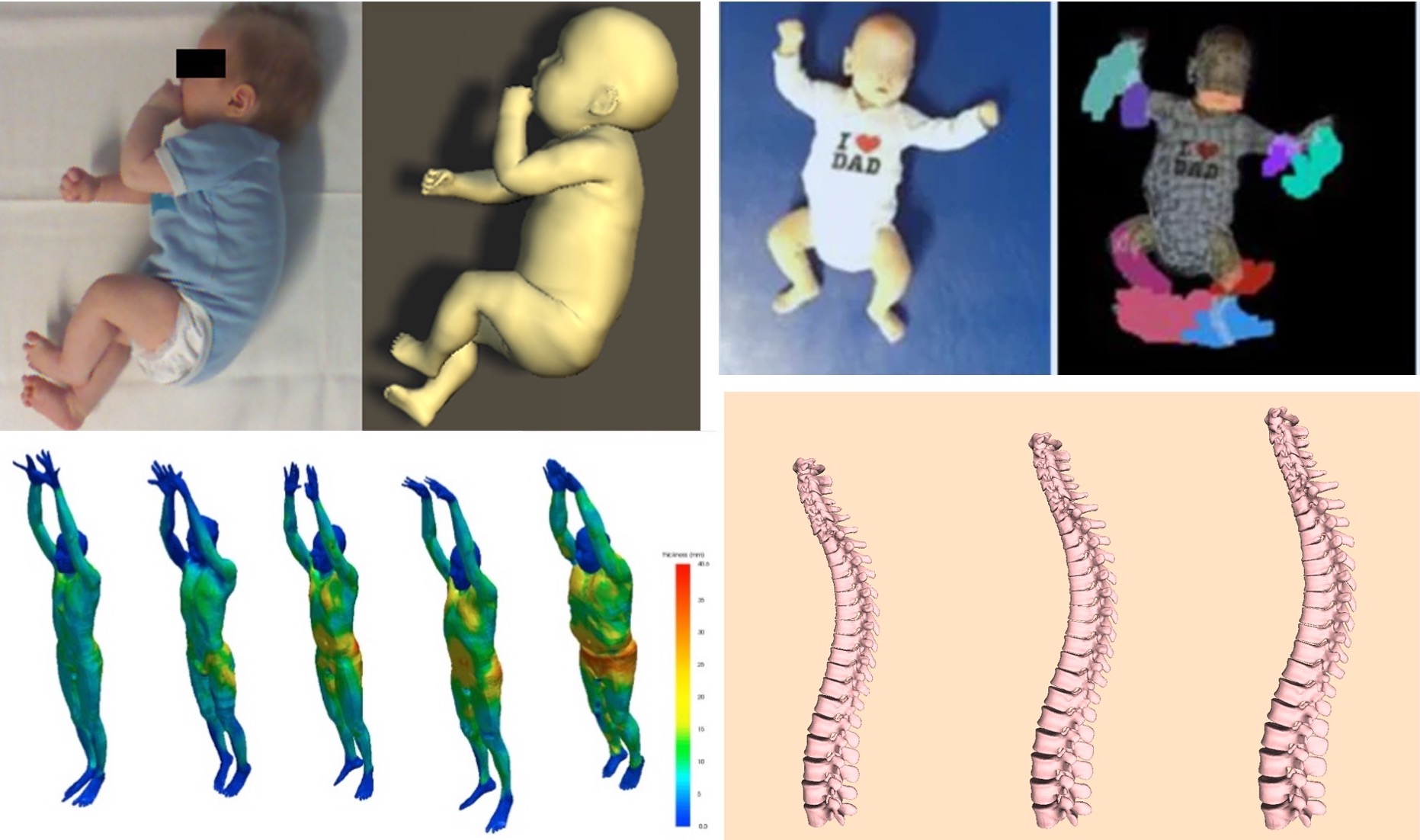
For example, if Cerebral Palsy (CP) is detected early, there are effective therapies to minimize the impact in later life. CP can be diagnosed in infants based on their spontaneous, undirected movements. Unfortunately, this requires expert training that is not widely available. By automatically tracking infant movement, we can automate the early detection of CP. Methods for tracking adult 3D motion, however, do not work for infants due to their very different body shape.
Since we lack 3D scans of infants, we developed a novel method that learns an infant body shape model, called SMIL, directly from low quality, incomplete, RGB-D scan sequences and deployed this in hospitals where we scanned over 30 infants [![]() ]. Using SMIL we track spontaneous infant movements in RGB-D sequences and train a method to automatically recognize pathological movements [
]. Using SMIL we track spontaneous infant movements in RGB-D sequences and train a method to automatically recognize pathological movements [![]() ].
].
We also train methods to predict what is inside the body by observing the outside. Take, for example, the distribution of body fat. Visceral adipose tissue is correlated with disease while sub-cutaneous adipose tissue is relatively benign. We are developing methods to estimate this fat distribution purely from the surface shape of the body. To that end, we fit our 3D body models to full-body MRI scans [![]() ] to model both the external surface and the subcutaneous fat layer.
] to model both the external surface and the subcutaneous fat layer.
To make predictions of the body composition of a person from a surface scan, a main challenge lies in the variance of the body shape due to the pose. In collaboration with the University of Hawai'i Cancer Center (US) we show how SMPL allows us to factor out pose variations from surface scan data, improving the accuracy of the body composition estimation [![]() ].
].
Members




Publications