Autonomous Robotic Manipulation
Modeling Top-Down Saliency for Visual Object Search
Interactive Perception
State Estimation and Sensor Fusion for the Control of Legged Robots
Probabilistic Object and Manipulator Tracking
Global Object Shape Reconstruction by Fusing Visual and Tactile Data
Robot Arm Pose Estimation as a Learning Problem
Learning to Grasp from Big Data
Gaussian Filtering as Variational Inference
Template-Based Learning of Model Free Grasping
Associative Skill Memories
Real-Time Perception meets Reactive Motion Generation
Autonomous Robotic Manipulation
Learning Coupling Terms of Movement Primitives
State Estimation and Sensor Fusion for the Control of Legged Robots
Inverse Optimal Control
Motion Optimization
Optimal Control for Legged Robots
Movement Representation for Reactive Behavior
Associative Skill Memories
Real-Time Perception meets Reactive Motion Generation
Humans from Video
Humans are in constant motion. Interactions with the world and with each other involve movement. To capture, model, and synthesize human behavior we need to analyze it in video. Despite this, most methods for human 3D human pose and shape (HPS) estimation focus on single images. Intuitively, we should be able to exploit the regularity of human motion and the extra information provided by multiple video frames to improve HPS estimation compared to single-image methods. To that end, we are pursuing several lines or research to enable accurate markerless motion capture from unconstrained video "in the wild".
A key enabler of video-based analysis of motion is training data. To that end, we have exploited our 3D body models (SMPL, etc.) and MoSh, to create the large-scale AMASS dataset [![]() ] of human motions in a common 3D representation. We used an early version of this to generate the SURREAL dataset [
] of human motions in a common 3D representation. We used an early version of this to generate the SURREAL dataset [![]() ], which contains rendered videos of people in motion. We used SURREAL, for example, to train methods to estimate the optical flow of people in video [
], which contains rendered videos of people in motion. We used SURREAL, for example, to train methods to estimate the optical flow of people in video [![]() ]. We also used AMASS to train a network to estimate 3D human pose from a sparse set of IMUs [
]. We also used AMASS to train a network to estimate 3D human pose from a sparse set of IMUs [![]() ].
].
Synthetic datasets like SURREAL are not fully representative of real-world video. Consequently, we created the 3D Poses in the Wild dataset (3DPW) by combining IMU data with monocular video. IMUs are prone to drift but give 3D pose information. Videos give precise 2D alignment with image pixels but lack 3D. By combining these sources of information, 3DPW provides class-leading pseudo ground truth and is, consequently, widely used for training and evaluation.
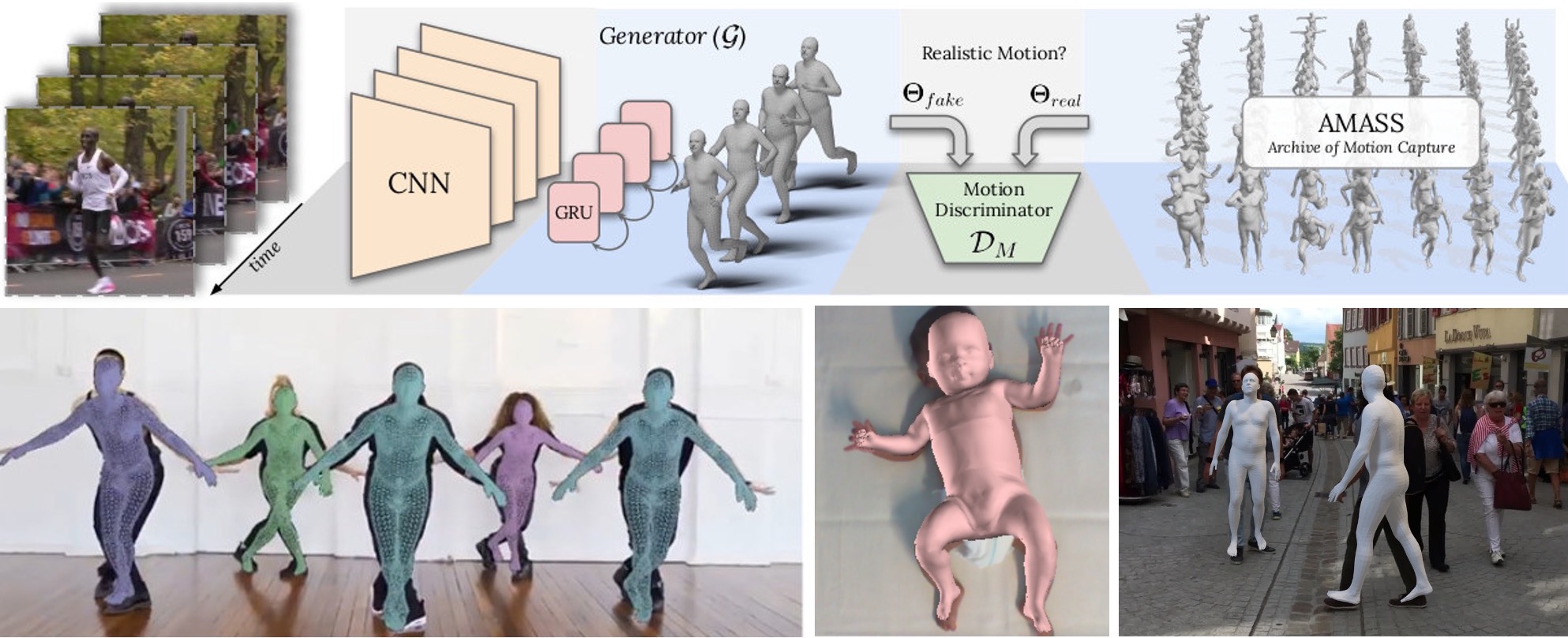
To estimate 3D humans from video, we have pursued both optimization and regression approaches. Multi-View-SMPLify [![]() ] optimizes 3D pose over time using a generic DCT temporal prior. In contrast, VIBE [
] optimizes 3D pose over time using a generic DCT temporal prior. In contrast, VIBE [![]() ] uses a GRU-based temporal architecture to regress SMPL from video. VIBE exploits discriminative training using AMASS [
] uses a GRU-based temporal architecture to regress SMPL from video. VIBE exploits discriminative training using AMASS [![]() ] to help the network generate motions that resemble true human movement.
] to help the network generate motions that resemble true human movement.
With SMIL [![]() ], we capture the motion of infants in RGB-D sequences but go further to use the sequences to learn the 3D shape model. By analyzing the movements of the infants, we provide an assessment related to cerebral palsy [
], we capture the motion of infants in RGB-D sequences but go further to use the sequences to learn the 3D shape model. By analyzing the movements of the infants, we provide an assessment related to cerebral palsy [![]()
![]() ].
].
Members











Publications