Autonomous Robotic Manipulation
Modeling Top-Down Saliency for Visual Object Search
Interactive Perception
State Estimation and Sensor Fusion for the Control of Legged Robots
Probabilistic Object and Manipulator Tracking
Global Object Shape Reconstruction by Fusing Visual and Tactile Data
Robot Arm Pose Estimation as a Learning Problem
Learning to Grasp from Big Data
Gaussian Filtering as Variational Inference
Template-Based Learning of Model Free Grasping
Associative Skill Memories
Real-Time Perception meets Reactive Motion Generation
Autonomous Robotic Manipulation
Learning Coupling Terms of Movement Primitives
State Estimation and Sensor Fusion for the Control of Legged Robots
Inverse Optimal Control
Motion Optimization
Optimal Control for Legged Robots
Movement Representation for Reactive Behavior
Associative Skill Memories
Real-Time Perception meets Reactive Motion Generation
Understanding Action Recognition (JHMDB)
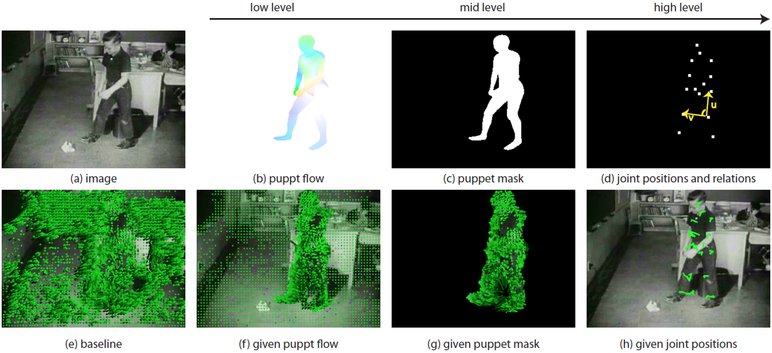
Although action recognition in videos is widely studied, current methods often fail on real-world datasets. Many recent approaches improve accuracy and robustness to cope with challenging video sequences, but it is often unclear what affects the results most. This paper attempts to provide insights based on a systematic performance evaluation using thoroughly-annotated data of human actions. We annotate human Joints for the HMDB dataset (J-HMDB). This annotation can be used to derive ground truth optical flow and segmentation. We evaluate current methods using this dataset and systematically replace the output of various algorithms with ground truth. This enables us to discover what is important – for example, should we work on improving flow algorithms, estimating human bounding boxes, or enabling pose estimation? In summary, we find that highlevel pose features greatly outperform low/mid level features; in particular, pose over time is critical. While current pose estimation algorithms are far from perfect, features extracted from estimated pose on a subset of J-HMDB, in which the full body is visible, outperform low/mid-level features. We also find that the accuracy of the action recognition framework can be greatly increased by refining the underlying low/mid level features; this suggests it is important to improve optical flow and human detection algorithms. Our analysis and J-HMDB dataset should facilitate a deeper understanding of action recognition algorithms.
Members




Publications