Autonomous Robotic Manipulation
Modeling Top-Down Saliency for Visual Object Search
Interactive Perception
State Estimation and Sensor Fusion for the Control of Legged Robots
Probabilistic Object and Manipulator Tracking
Global Object Shape Reconstruction by Fusing Visual and Tactile Data
Robot Arm Pose Estimation as a Learning Problem
Learning to Grasp from Big Data
Gaussian Filtering as Variational Inference
Template-Based Learning of Model Free Grasping
Associative Skill Memories
Real-Time Perception meets Reactive Motion Generation
Autonomous Robotic Manipulation
Learning Coupling Terms of Movement Primitives
State Estimation and Sensor Fusion for the Control of Legged Robots
Inverse Optimal Control
Motion Optimization
Optimal Control for Legged Robots
Movement Representation for Reactive Behavior
Associative Skill Memories
Real-Time Perception meets Reactive Motion Generation
Motion Blur in Layers
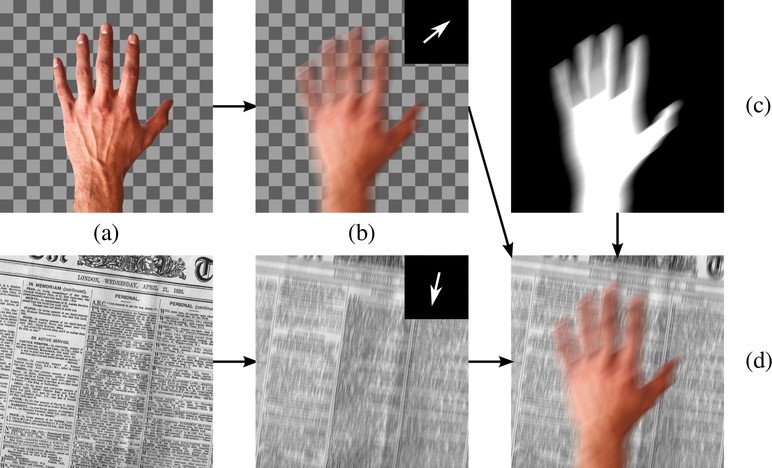
Videos contain complex spatially-varying motion blur due to the combination of object motion, camera motion, and depth variation with finite shutter speeds. Existing methods to estimate optical flow, deblur the images, and segment the scene fail in such cases. In particular, boundaries between differently moving objects cause problems, because here the blurred images are a combination of the blurred appearances of multiple surfaces. We address this with a novel layered model of scenes in motion. From a motion-blurred video sequence, we jointly estimate the layer segmentation and each layer’s appearance and motion. Since the blur is a function of the layer motion and segmentation, it is completely determined by our generative model. Given a video, we formulate the optimization problem as minimizing the pixel error between the blurred frames and images synthesized from the model, and solve it using gradient descent. We demonstrate our approach on synthetic and real sequences.
Video
Members


Publications