
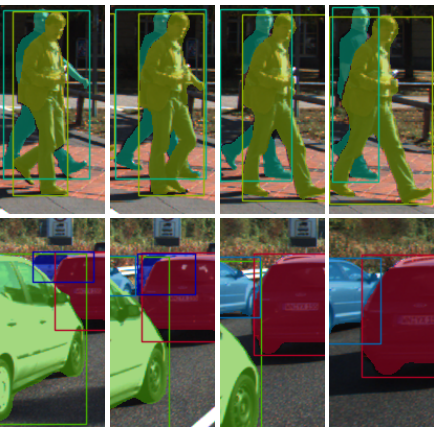
This paper extends the popular task of multi-object tracking to multi-object tracking and segmentation (MOTS). Towards this goal, we create dense pixel-level annotations for two existing tracking datasets using a semi-automatic annotation procedure. Our new annotations comprise 65,213 pixel masks for 977 distinct objects (cars and pedestrians) in 10,870 video frames. For evaluation, we extend existing multi-object tracking metrics to this new task. Moreover, we propose a new baseline method which jointly addresses detection, tracking, and segmentation with a single convolutional network. We demonstrate the value of our datasets by achieving improvements in performance when training on MOTS annotations. We believe that our datasets, metrics and baseline will become a valuable resource towards developing multi-object tracking approaches that go beyond 2D bounding boxes.
| Author(s): | Paul Voigtlaender and Michael Krause and Aljosa Osep and Jonathon Luiten and Berin Balachandar Gnana Sekar and Andreas Geiger and Bastian Leibe |
| Book Title: | Proceedings IEEE Conf. on Computer Vision and Pattern Recognition (CVPR) |
| Year: | 2019 |
| Month: | June |
| Bibtex Type: | Conference Paper (inproceedings) |
| Event Name: | IEEE International Conference on Computer Vision and Pattern Recognition (CVPR) 2019 |
| Event Place: | Long Beach, USA |
| Electronic Archiving: | grant_archive |
| Links: | |
BibTex
@inproceedings{Voigtlaender2019CVPR,
title = {MOTS: Multi-Object Tracking and Segmentation},
booktitle = {Proceedings IEEE Conf. on Computer Vision and Pattern Recognition (CVPR)},
abstract = {This paper extends the popular task of multi-object tracking to multi-object tracking and segmentation (MOTS). Towards this goal, we create dense pixel-level annotations for two existing tracking datasets using a semi-automatic annotation procedure. Our new annotations comprise 65,213 pixel masks for 977 distinct objects (cars and pedestrians) in 10,870 video frames. For evaluation, we extend existing multi-object tracking metrics to this new task. Moreover, we propose a new baseline method which jointly addresses detection, tracking, and segmentation with a single convolutional network. We demonstrate the value of our datasets by achieving improvements in performance when training on MOTS annotations. We believe that our datasets, metrics and baseline will become a valuable resource towards developing multi-object tracking approaches that go beyond 2D bounding boxes.},
month = jun,
year = {2019},
slug = {voigtlaender2019cvpr},
author = {Voigtlaender, Paul and Krause, Michael and Osep, Aljosa and Luiten, Jonathon and Sekar, Berin Balachandar Gnana and Geiger, Andreas and Leibe, Bastian},
month_numeric = {6}
}