Dynamic Locomotion
29-03-2024
Patent granted for 'Advanced mechanism for segmented robotic legs'
Patent granted for 'Advanced mechanism for segmented robotic legs'
Alborz Aghamaleki Sarvestani
Alexander Badri-Spröwitz
Dynamic Locomotion
Award
09-06-2023
Best Poster Presentation Award
Human-like bipedal robot achieves fast walking gait with mono- and biarticular spring-tendon powered ankle push-off
Bernadett Kiss
Emre Cemal Gönen
An Mo
Alexander Badri-Spröwitz
Dynamic Locomotion
Award
09-06-2023
Best Robot Demo at AMAM 2023
Human-like bipedal robot achieves fast walking gait with mono- and biarticular spring-tendon powered ankle push-off
Bernadett Kiss
Dynamic Locomotion
Award
01-06-2023
IEEE Outstanding Locomotion Paper Award
Abhishek Chatterjee, An Mo, Bernadett Kiss, Emre Cemal Goenen, and Alexander Badri-Spröwitz received the best paper award in the category 'outstanding locomotion paper award’, at ICRA 2023
Abhishek Chatterjee
An Mo
Bernadett Kiss
Emre Cemal Gönen
Alexander Badri-Spröwitz
Dynamic Locomotion
25-02-2023
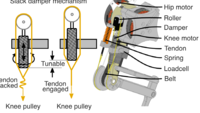
Slack-based Tunable Damping was published in Scientific Reports
Our work on 'Slack-based Tunable Damping' was published in Scientific Reports
An Mo
Fabio Izzi
Emre Cemal Gönen
Alexander Badri-Spröwitz
Dynamic Locomotion
24-10-2022
Published at ICRA 2022: Gastrocnemius and Power Amplifier Soleus Spring-Tendons Achieve Fast Human-like Walking in a Bipedal Robot
Bernadett Kiss presents her work on lower leg biomechanics at ICRA 2022, and demos the Ecowalker robot. This is collaborative work together with Alexandra Buchmann and Daniel Renjewski (TU Munich).
Bernadett Kiss
Emre Cemal Gönen
An Mo
Alexander Badri-Spröwitz
Dynamic Locomotion
News
18-07-2022
Learning plastic matching
Learning plastic matching of robot dynamics in closed loop Central Pattern Generators at Nature Machine Intelligence
Felix Ruppert
Alexander Badri-Spröwitz
Dynamic Locomotion
18-07-2022
NMI publication: Learning plastic matching of robot dynamics in closed-loop central pattern generators
We published our work on plastic learning in legged robots, with central pattern generators, in Nature Machine Intelligence.
Felix Ruppert
Alexander Badri-Spröwitz
Dynamic Locomotion
News
18-07-2022
Robot dog learns to walk in one hour
Virtual spinal cord is continuously optimized
Like a newborn animal, a four-legged robot stumbles around during its first walking attempts. But while a foal or a giraffe needs much longer to master walking, the robot learns to move forward fluently in just one hour. A computer program acts as the artificial presentation of the animal’s spinal cord, and learns to optimize the robot's movement in a short time. The artificial neural network is not yet ideally adjusted at the beginning, but rapidly self-adjusts. On July 18, the research work which is at the intersection of robotics and biology was published in the renowned journal Nature Machine Intelligence.
Felix Ruppert
Alexander Badri-Spröwitz
Dynamic Locomotion
News
06-05-2022
Felix Ruppert defends his PhD research
Felix very successfully defended his PhD research.
Felix Ruppert

Dynamic Locomotion
News
31-03-2022
Emre Cemal Goenen joins DLG
We welcome Emre Cemal Goenen as new PhD candidate researcher at DLG.
Emre Cemal Gönen

Dynamic Locomotion
News
16-03-2022
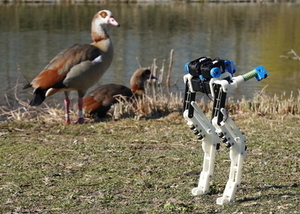
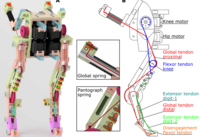
BirdBot is energy-efficient thanks to nature as a model
A team of scientists at the Max Planck Institute for Intelligent Systems and the University of California, Irvine constructed a robot leg that, like its natural model, is very energy efficient. BirdBot benefits from a foot-leg coupling through a network of muscles and tendons that extends across multiple joints. In this way, BirdBot needs fewer motors than previous legged robots and could, theoretically, scale to large size. On March 16th, the researchers will publish their work in Science Robotics.
Alexander Badri-Spröwitz
Alborz Aghamaleki Sarvestani
Metin Sitti
Dynamic Locomotion
16-03-2022
BirdBot robot published in Science Robotics
Our work with BirdBot robot is finalished published in Science Robotics.
Alborz Aghamaleki Sarvestani
Alexander Badri-Spröwitz
Dynamic Locomotion
News
01-03-2022
Abhishek Chatterjee joins DLG
Abhishek Chatterjee joins as postdoc researcher. Welcome at DLG!
Abhishek Chatterjee

Dynamic Locomotion
News
06-05-2021
Oezge Drama Ph.D. defense
Oezge defends her Ph.D.
Ph.D. defense.
Oezge Drama

Dynamic Locomotion
News
15-03-2021
Bernadett Kiss joins DLG
New group member
Bernadett Kiss becomes new Dynamic Locomotion Group member.
Bernadett Kiss

Movement Generation and Control
Dynamic Locomotion
Robotics
News
16-06-2020
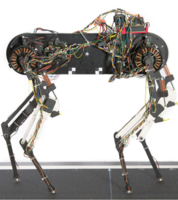
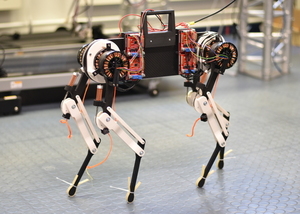
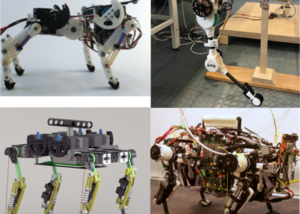
Four-legged robot makes research comparable worldwide
Solo 8 is a new research robot, developed as an open-source project in the German cities of Tübingen and Stuttgart. The dog-resembling, torque-controlled quadruped is capable of very dynamic movements. It is made entirely of 3D printed parts and off-the-shelf components, which makes it an easy to replicate platform ideal for fundamental research in legged locomotion and robotic education. The project aims to provide robotic research labs around the world with an easy-to-assemble legged robot kit that doesn’t break the bank. Additionally, software on Solo 8 is constantly improved and publicly available on GitHub. In return, the scientists of the Max Planck Institute for Intelligent Systems hope to exchange insights with other teams. Running experiments on the same platform creates comparative data – an ideal foundation for rapid progress in the research field of robotics.
Felix Grimminger
Avadesh Meduri
Majid Khadiv
Julian Viereck
Manuel Wüthrich
Maximilien Naveau
Vincent Berenz
Steve Heim
Felix Widmaier / Kloss
Jonathan Fiene
Alexander Badri-Spröwitz
Ludovic Righetti

Autonomous Vision
Autonomous Learning
Dynamic Locomotion
Intelligent Control Systems
News
29-04-2020
MPI for Intelligent Systems continues video series
Video No 4 is now available
Short films present scientists' research projects in an understandable way
Alejandro Posada
Andreas Geiger
Alexander Badri-Spröwitz
Georg Martius
Sebastian Trimpe

Dynamic Locomotion
News
17-09-2019
Workshop 'Integrating neuroscience and biomechanics: ...'
Workshop organisation
Charlotte Le Mouel
Alexander Badri-Spröwitz

Dynamic Locomotion
News
13-09-2019
Humanoids 2019: Trunk Pitch Oscillations in Humanoids
Humanoids 2019: Trunk Pitch Oscillations in Humanoids
Trunk Pitch Oscillations in Humanoids: Oezge Drama will present her work at Humanoids 2019, in Toronto, Canada.
Oezge Drama
Alexander Badri-Spröwitz

Dynamic Locomotion
News
12-09-2019
CoRL2019: A Learnable Safety Measure
CoRL2019: A Learnable Safety Measure
Steve Heim and Alexander von Rohr will present 'A Learnable Safety Measure' at CoRL end of November 2019.
Steve Heim
Alexander von Rohr
Sebastian Trimpe
Alexander Badri-Spröwitz
Dynamic Locomotion
News
13-08-2019
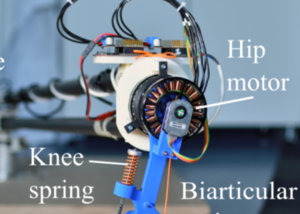
Frontiers in Neurorobotics: Series Elastic Behavior of Biarticular Muscle-Tendon Structure in a Robotic Leg
Frontiers in Neurorobotics: Series Elastic Behavior of Biarticular Muscle-Tendon ...
Felix Ruppert
Alexander Badri-Spröwitz
Dynamic Locomotion
News
05-08-2019
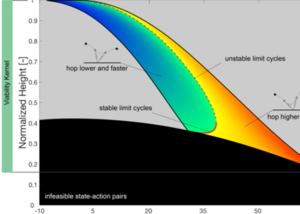
TR-O: Beyond Basins of Attraction: Quantifying Robustness of Natural Dynamics
TR-O: Beyond Basins of Attraction: Quantifying Robustness of Natural Dynamics
Steve Heim
Alexander Badri-Spröwitz
Dynamic Locomotion
News
19-06-2018
Cooperation work on Oncilla Open-Source Quadruped Robot
Open-Source Quadruped Robot
Our publication behind the open-source Oncilla quadruped robot project, developed at the Biorobotics Laboratory at EPFL, Lausanne Switzerland and several other universities in Europe, just has been published.
Alexander Badri-Spröwitz

Dynamic Locomotion
News
21-05-2018
ICRA2018: Shaping in Practice: Training Wheels to Learn Fast Hopping Directly in Hardware
Our paper 'Shaping in Practice: Training Wheels to Learn Fast Hopping Directly in Hardware' was accepted for ICRA2018. It will be presented in May 2018 in Brisbane. See you there!
Steve Heim
Felix Ruppert
Alborz Aghamaleki Sarvestani
Alexander Badri-Spröwitz

Dynamic Locomotion
News
14-05-2018
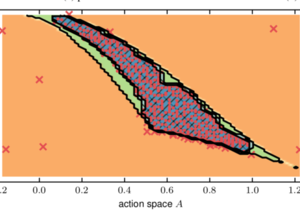
SIMPAR2018: Learning from Outside the Viability Kernel
Our paper 'Learning from Outside the Viability Kernel: Why we Should Build Robots that can Fail with Grace ' was accepted for SIMPAR2018. Steve Heim will present his work in May 2018 in Brisbane (SIMPAR: Brisbane, Australia, 16-19 May 2018).
Steve Heim
Alexander Badri-Spröwitz

Dynamic Locomotion
News
27-04-2018
Alexander Spröwitz presents research at final meeting of DFG project 'Das verdatete Tier'
Alexander Spröwitz gives an invited talk at the final DFG project meeting 'Das verdatete Tier' at Ruhr-Universität Bochum. This DFG project final meeting is organized by Prof. Dr. Stefan Rieger and Ina Bolinski, M.A. .
Alexander Badri-Spröwitz

Dynamic Locomotion
News
26-02-2018
Viktoriia Kamska joins DLG
Viktoriia Kamska is joining DLG as a phd candidate researcher. Welcome!
Viktoriia Kamska
Dynamic Locomotion
News
30-10-2017
Open PhD research position
[This position is now closed] Open PhD research position in mechatronic design of legged robots for locomotion research.
Alexander Badri-Spröwitz
Dynamic Locomotion
News
29-10-2017
Talk at SWARM 2017 workshop
Talk at SWARM 2017
Alexander Badri-Spröwitz

Dynamic Locomotion
News
19-07-2017
Benedikt Gyoerfi presents Master thesis
Benedikt Gyoerfi presents his Master thesis
Benedikt Gyoerfi

Dynamic Locomotion
News
30-06-2017
Steve receives 'Outstanding Poster Award' at AMAM2017
Steve receives 'Outstanding Poster Award'
Steve Heim