Autonomous Robots that Walk and Fly (Max Planck Lecture)
While robots are already doing a wonderful job as factory workhorses, they are now gradually appearing in our daily environments and offering their services as autonomous cars, delivery drones, helpers in search and rescue and much more.
This talk will present some recent highlights in the field of autonomous mobile robotics research and touch on some of the great challenges and opportunities.
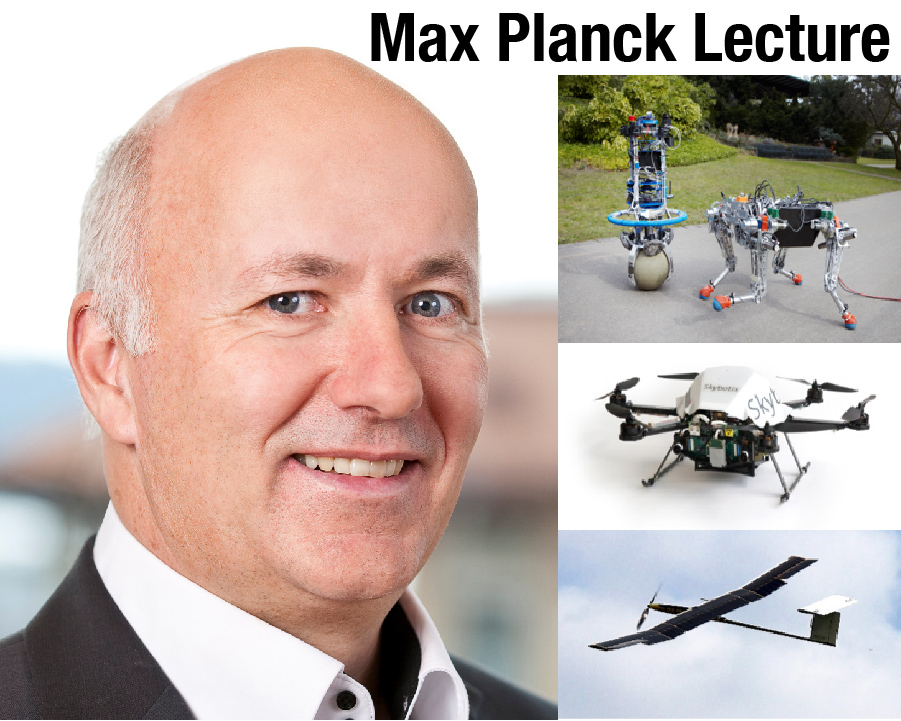
Legged robots are able to overcome the limitations of wheeled or tracked ground vehicles. ETH’s electrically powered legged quadruped robots are designed for high agility, efficiency and robustness in rough terrain. This is realized through an optimal exploitation of the natural dynamics and serial elastic actuation.
For fast inspection of complex environments, flying robots are probably the most efficient and versatile devices. However, the limited payload and computing power of drones renders autonomous navigation quite challenging. Thanks to our custom designed visual-inertial sensor, real-time on-board localization, mapping and planning has become feasible and enables our multi-copters and solar-powered fixed wing drones for advanced rescue and inspection tasks or support in precision farming, even in GPS-denied environments.
Biography: Roland Siegwart (born in 1959) is professor for autonomous mobile robots at ETH Zurich, founding co-director of the Wyss Translational Center Zurich and member of the board of directors of multiple high tech companies. He studied mechanical engineering at ETH, spent ten years as professor at EPF Lausanne (1996 – 2006), was vice president of ETH Zurich (2010 – 2014) and held visiting positions at Stanford University and NASA Ames. He is and was the coordinator of multiple European projects and co-founder of half a dozen spin-off companies. He is IEEE Fellow, recipient of the IEEE RAS Inaba Technical Award and officer of the International Federation of Robotics Research (IFRR). He is in the editorial board of multiple journals in robotics and was a general chair of several conferences in robotics including IROS 2002, AIM 2007, FSR 2007, ISRR 2009 and FSR 2017. His interests are in the design and navigation of wheeled, walking and flying robots operating in complex and highly dynamical environments. He is also a strong promotor of innovation and entrepreneurship in Switzerland.
max planck lecture
robotics
locomotion
mobile robots
flying robots
autonomous systems
Details
- 22 October 2018 • 11:00 - 12:00
- MPI-IS, Lecture Hall 2D5, Heisenbergstraße 1, Stuttgart
- Intelligent Systems



