Embodied Vision
Members
Publications
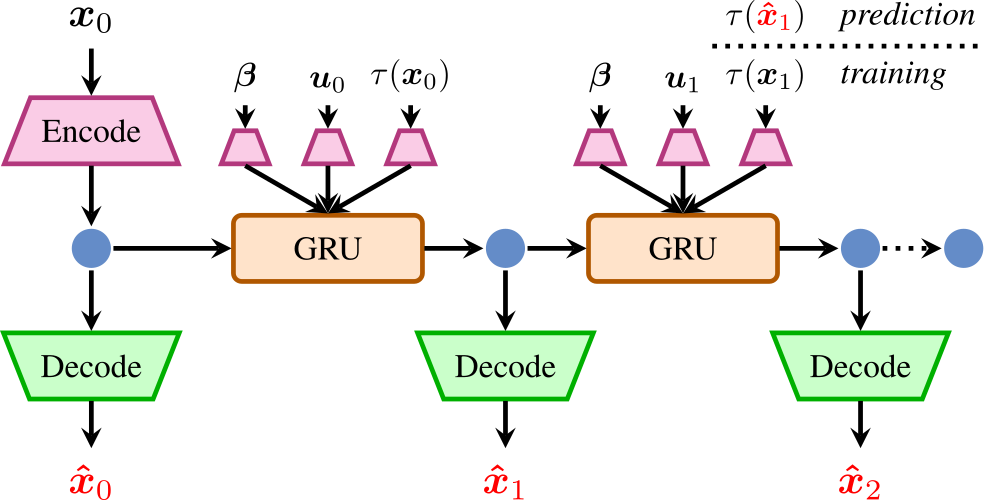
Model architecture of TRADYN. © IEEE. Reprinted, with permission, from [ ].
].
Learning a Robot- and Terrain-Aware Context-Conditional Dynamics Models for Navigation
In TRADYN [], we learn a terrain- and robot-aware dynamics model for navigation control in a 2D simulation. It extends Explore the Context (EtC) [] which learns an adaptive dynamics model which is conditioned on past motion experience and uses this model for sampling-based model-predictive control. EtC is extended by additional inputting terrain features from a map at the predicted location of the robot.
n/a
Members




Publications
Embodied Vision
Conference Paper
Context-Conditional Navigation with a Learning-Based Terrain- and Robot-Aware Dynamics Model
Guttikonda, S., Achterhold, J., Li, H., Boedecker, J., Stueckler, J.
In Proceedings of the European Conference on Mobile Robots (ECMR), 2023 (Published)
preprint
code
DOI
URL
BibTeX
Embodied Vision
Conference Paper
Explore the Context: Optimal Data Collection for Context-Conditional Dynamics Models
Achterhold, J., Stueckler, J.
In Proceedings of The 24th International Conference on Artificial Intelligence and Statistics (AISTATS 2021) , 130, JMLR, Cambridge, MA, Titel The 24th International Conference on Artificial Intelligence and Statistics (AISTATS 2021) , April 2021, preprint CoRR abs/2102.11394 (Published)
Preprint
Project page
Poster
URL
BibTeX