Design and actuation of a magnetic millirobot under a constant unidirectional magnetic field


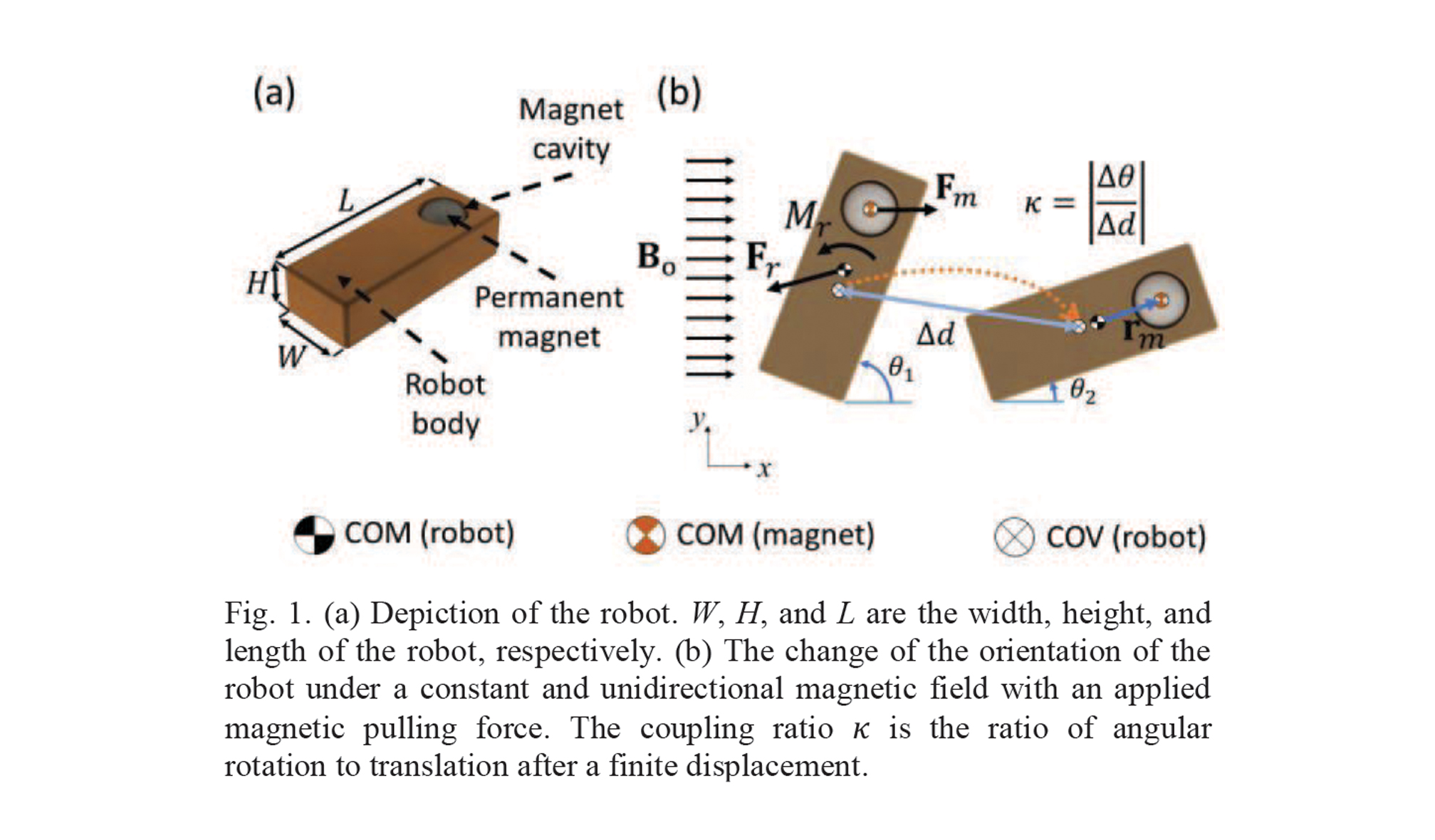
Magnetic untethered millirobots, which are actuated and controlled by remote magnetic fields, have been proposed for medical applications due to their ability to safely pass through tissues at long ranges. For example, magnetic resonance imaging (MRI) systems with a 3-7 T constant unidirectional magnetic field and 3D gradient coils have been used to actuate magnetic robots. Such magnetically constrained systems place limits on the degrees of freedom that can be actuated for untethered devices. This paper presents a design and actuation methodology for a magnetic millirobot that exhibits both position and orientation control in 2D under a magnetic field, dominated by a constant unidirectional magnetic field as found in MRI systems. Placing a spherical permanent magnet, which is free to rotate inside the millirobot and located away from the center of mass, allows the generation of net forces and torques with applied 3D magnetic field gradients. We model this system in a 3D planar case and experimentally demonstrate open-loop control of both position and orientation by the applied 2D field gradients. The actuation performance is characterized across the most important design variables, and we experimentally demonstrate that the proposed approach is feasible.
| Author(s): | Erin, O. and Giltinan, J. and Tsai, L. and Sitti, M. |
| Book Title: | 2017 IEEE International Conference on Robotics and Automation (ICRA) |
| Journal: | 2017 IEEE International Conference on Robotics and Automation (ICRA) |
| Pages: | 3404-3410 |
| Year: | 2017 |
| Month: | May |
| Day: | 29-3 |
| Publisher: | IEEE |
| Bibtex Type: | Conference Paper (inproceedings) |
| Address: | Piscataway, NJ, USA |
| DOI: | 10.1109/ICRA.2017.7989387 |
| Event Name: | IEEE International Conference on Robotics and Automation (ICRA) |
| Event Place: | Singapore, Singapore |
| Electronic Archiving: | grant_archive |
| ISBN: | 978-1-5090-4633-1 |
BibTex
@inproceedings{7989387,
title = {Design and actuation of a magnetic millirobot under a constant unidirectional magnetic field},
journal = {2017 IEEE International Conference on Robotics and Automation (ICRA)},
booktitle = {2017 IEEE International Conference on Robotics and Automation (ICRA)},
abstract = { Magnetic untethered millirobots, which are actuated and controlled by remote magnetic fields, have been proposed for medical applications due to their ability to safely pass through tissues at long ranges. For example, magnetic resonance imaging (MRI) systems with a 3-7 T constant unidirectional magnetic field and 3D gradient coils have been used to actuate magnetic robots. Such magnetically constrained systems place limits on the degrees of freedom that can be actuated for untethered devices. This paper presents a design and actuation methodology for a magnetic millirobot that exhibits both position and orientation control in 2D under a magnetic field, dominated by a constant unidirectional magnetic field as found in MRI systems. Placing a spherical permanent magnet, which is free to rotate inside the millirobot and located away from the center of mass, allows the generation of net forces and torques with applied 3D magnetic field gradients. We model this system in a 3D planar case and experimentally demonstrate open-loop control of both position and orientation by the applied 2D field gradients. The actuation performance is characterized across the most important design variables, and we experimentally demonstrate that the proposed approach is feasible. },
pages = {3404-3410},
publisher = {IEEE},
address = {Piscataway, NJ, USA},
month = may,
year = {2017},
slug = {7989387},
author = {Erin, O. and Giltinan, J. and Tsai, L. and Sitti, M.},
month_numeric = {5}
}