High Strain Peano Hydraulically Amplified Self-healing Electrostatic (HASEL) Transducers


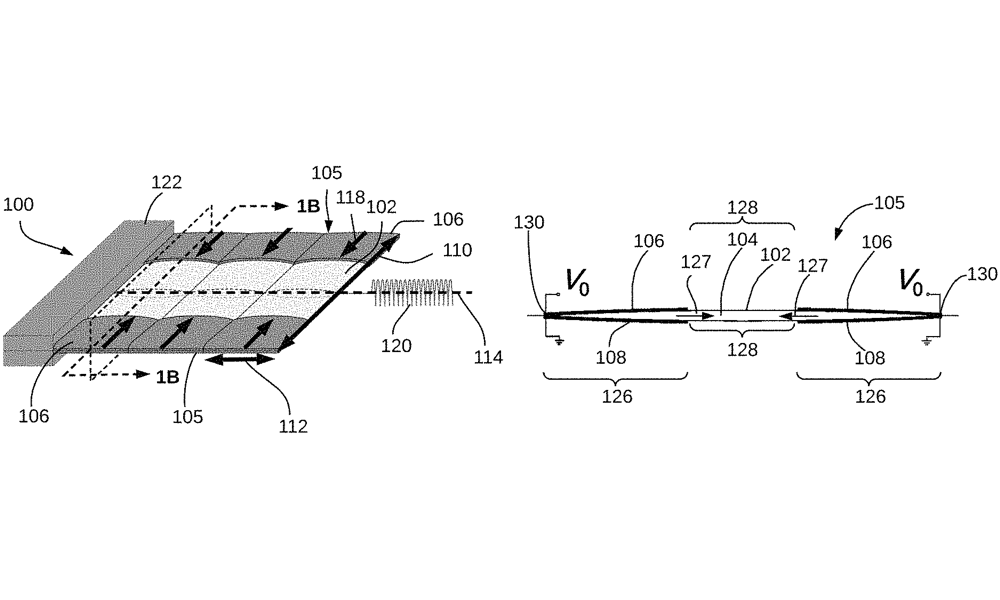
High strain hydraulically amplified self-healing electrostatic transducers having increased maximum theoretical and practical strains are disclosed. In particular, the actuators include electrode configurations having a zipping front created by the attraction of the electrodes that is configured orthogonally to a strain axis along which the actuators. This configuration produces increased strains. In turn, various form factors for the actuator configuration are presented including an artificial circular muscle and a strain amplifying pulley system. Other actuator configurations are contemplated that include independent and opposed electrode pairs to create cyclic activation, hybrid electrode configurations, and use of strain limiting layers for controlled deflection of the actuator.
| Author(s): | Christoph Matthias Keplinger and Xingrui Wang and Shane Karl Mitchell |
| Number (issue): | US Patent 11635094 |
| Year: | 2023 |
| Month: | April |
| Day: | 25 |
| Bibtex Type: | Patent (patent) |
| Electronic Archiving: | grant_archive |
| URL: | https://patentimages.storage.googleapis.com/54/ff/0d/442460a570a349/US11635094.pdf |
BibTex
@patent{PCT-US2023-US11635094B2,
title = {High Strain Peano Hydraulically Amplified Self-healing Electrostatic (HASEL) Transducers},
abstract = {High strain hydraulically amplified self-healing electrostatic transducers having increased maximum theoretical and practical strains are disclosed. In particular, the actuators include electrode configurations having a zipping front created by the attraction of the electrodes that is configured orthogonally to a strain axis along which the actuators. This configuration produces increased strains. In turn, various form factors for the actuator configuration are presented including an artificial circular muscle and a strain amplifying pulley system. Other actuator configurations are contemplated that include independent and opposed electrode pairs to create cyclic activation, hybrid electrode configurations, and use of strain limiting layers for controlled deflection of the actuator.},
number = {US Patent 11635094},
month = apr,
year = {2023},
slug = {pct-us2023-us11635094b2},
author = {Keplinger, Christoph Matthias and Wang, Xingrui and Mitchell, Shane Karl},
url = {https://patentimages.storage.googleapis.com/54/ff/0d/442460a570a349/US11635094.pdf},
month_numeric = {4}
}