Autonomous Robotic Manipulation
Modeling Top-Down Saliency for Visual Object Search
Interactive Perception
State Estimation and Sensor Fusion for the Control of Legged Robots
Probabilistic Object and Manipulator Tracking
Global Object Shape Reconstruction by Fusing Visual and Tactile Data
Robot Arm Pose Estimation as a Learning Problem
Learning to Grasp from Big Data
Gaussian Filtering as Variational Inference
Template-Based Learning of Model Free Grasping
Associative Skill Memories
Real-Time Perception meets Reactive Motion Generation
Autonomous Robotic Manipulation
Learning Coupling Terms of Movement Primitives
State Estimation and Sensor Fusion for the Control of Legged Robots
Inverse Optimal Control
Motion Optimization
Optimal Control for Legged Robots
Movement Representation for Reactive Behavior
Associative Skill Memories
Real-Time Perception meets Reactive Motion Generation
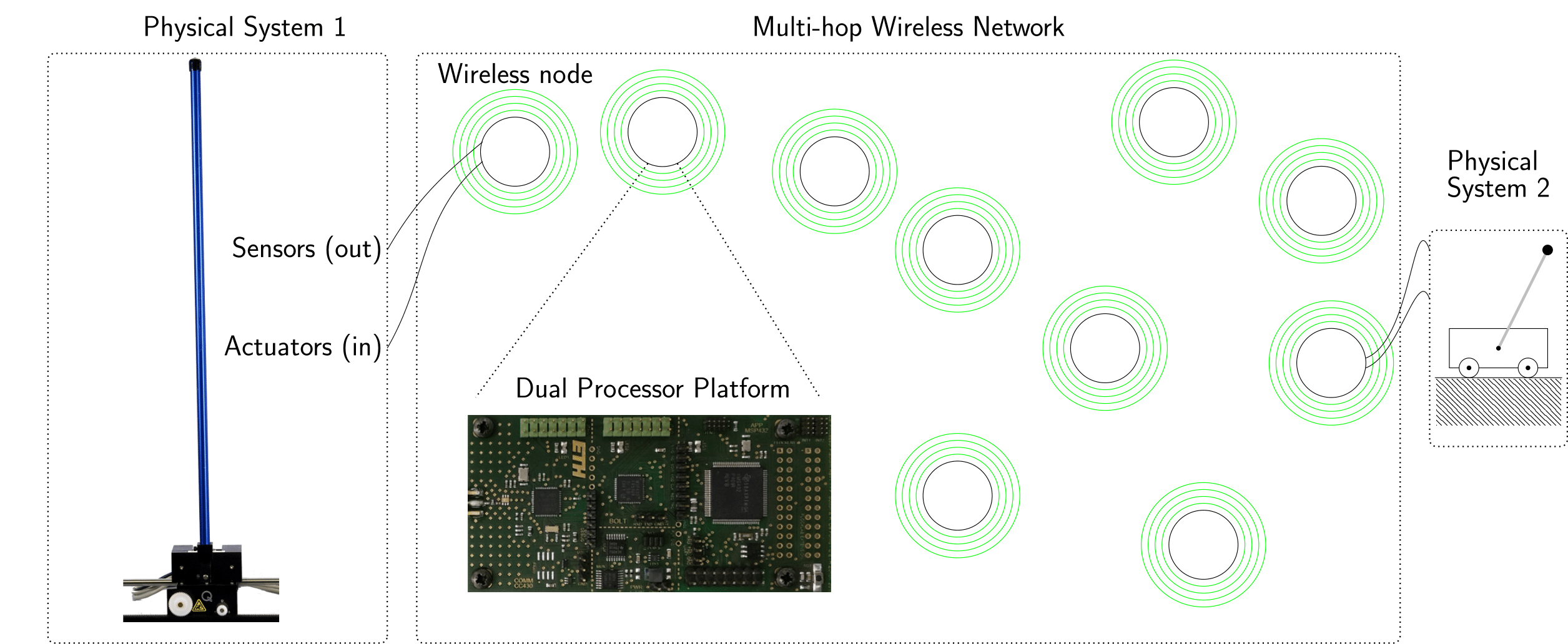
Event-based Wireless Control of Cyber-physical Systems
Cyber-physical systems (CPS) tightly integrate physical processes with computing and communication, thus, enabling emerging applications such as coordinated flight of autonomous vehicles or controlling factory automation machinery over wireless networks. The adoption of wireless technology offers unprecedented flexibility in sharing data between these systems, for example, to increase collective information or take collaborative action, but also comes with severe challenges. Wireless networks are orders of magnitude less reliable than wired communication, while feedback control typically poses strict requirements on reliability and timeliness of data.
Within this project, novel feedback control strategies are developed in order to realize the full potential of future CPSs [![]()
![]() ]. This is done by a tight co-design of network protocol and control system. The protocol tames natural imperfections of wireless communication to the extent possible. The control design then takes the remaining imperfections (delays and packet losses) into account to realize stable closed-loop control over low-power multi-hop networks. Stability is proven through a formal analysis and demonstrated on the cyber-physical testbed shown above that includes multiple, spatially distributed physical processes controlled over a multi-hop low-power wireless network [
]. This is done by a tight co-design of network protocol and control system. The protocol tames natural imperfections of wireless communication to the extent possible. The control design then takes the remaining imperfections (delays and packet losses) into account to realize stable closed-loop control over low-power multi-hop networks. Stability is proven through a formal analysis and demonstrated on the cyber-physical testbed shown above that includes multiple, spatially distributed physical processes controlled over a multi-hop low-power wireless network [![]() ].
].
A further challenge in wireless CPS is that they can easily be overloaded when multiple systems communicate over the same network. In order to realize energy savings and optimal system-level performance, communication should occur only if necessary to achieve desired performance. Current research activities within this project focus on the development of novel event-triggering mechanisms [![]()
![]()
![]() ] for the integration of control with the communication system and on learning-based concepts for further resource savings [
] for the integration of control with the communication system and on learning-based concepts for further resource savings [![]()
![]() ].
].
Video
Members



Publications