Bioinspired and wearable robotics
A soft, fast and versatile electrohydraulic gripper with capacitive object size detection
A versatile jellyfish-like robotic platform for effective underwater propulsion and manipulation
Electrohydraulic musculoskeletal robotic leg for agile, adaptive, yet energy-efficient locomotion
A multifunctional soft robotic shape display with high-speed actuation, sensing, and control
Cutaneous Electrohydraulic (CUTE) Wearable Devices for Pleasant Broad-Bandwidth Haptic Cues
Bioinspired and wearable robotics
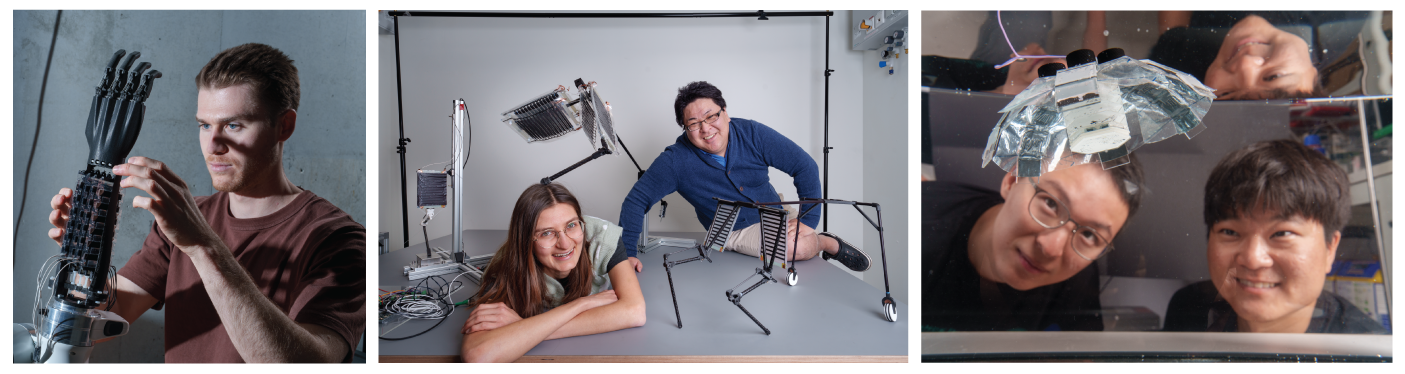
Robots inspired by the adaptability and versatility of biological systems have made significant strides in recent years, driven by innovations in machine learning and advanced controls, as well as the development of new robotic materials and components that overcome limitations of traditional rigid robotic hardware. Harnessing the inherent embodied intelligence of soft robotic systems, we aim to design components and robots based on new types of robotic materials that replicate the agility and dexterity of natural organisms, when performing tasks in complex environments.
We work on bioinspired designs of underwater and legged robots, that are driven by artificial muscles, which are fast, energy efficient and versatile. We are also developing new system architectures for human-machine interfaces and wearable robotics, showcasing unique new attributes and capabilities offered by soft electrostatic systems.