Autonomous Robotic Manipulation
Modeling Top-Down Saliency for Visual Object Search
Interactive Perception
State Estimation and Sensor Fusion for the Control of Legged Robots
Probabilistic Object and Manipulator Tracking
Global Object Shape Reconstruction by Fusing Visual and Tactile Data
Robot Arm Pose Estimation as a Learning Problem
Learning to Grasp from Big Data
Gaussian Filtering as Variational Inference
Template-Based Learning of Model Free Grasping
Associative Skill Memories
Real-Time Perception meets Reactive Motion Generation
Autonomous Robotic Manipulation
Learning Coupling Terms of Movement Primitives
State Estimation and Sensor Fusion for the Control of Legged Robots
Inverse Optimal Control
Motion Optimization
Optimal Control for Legged Robots
Movement Representation for Reactive Behavior
Associative Skill Memories
Real-Time Perception meets Reactive Motion Generation
Unsupervised Learning of Flow with Occlusions
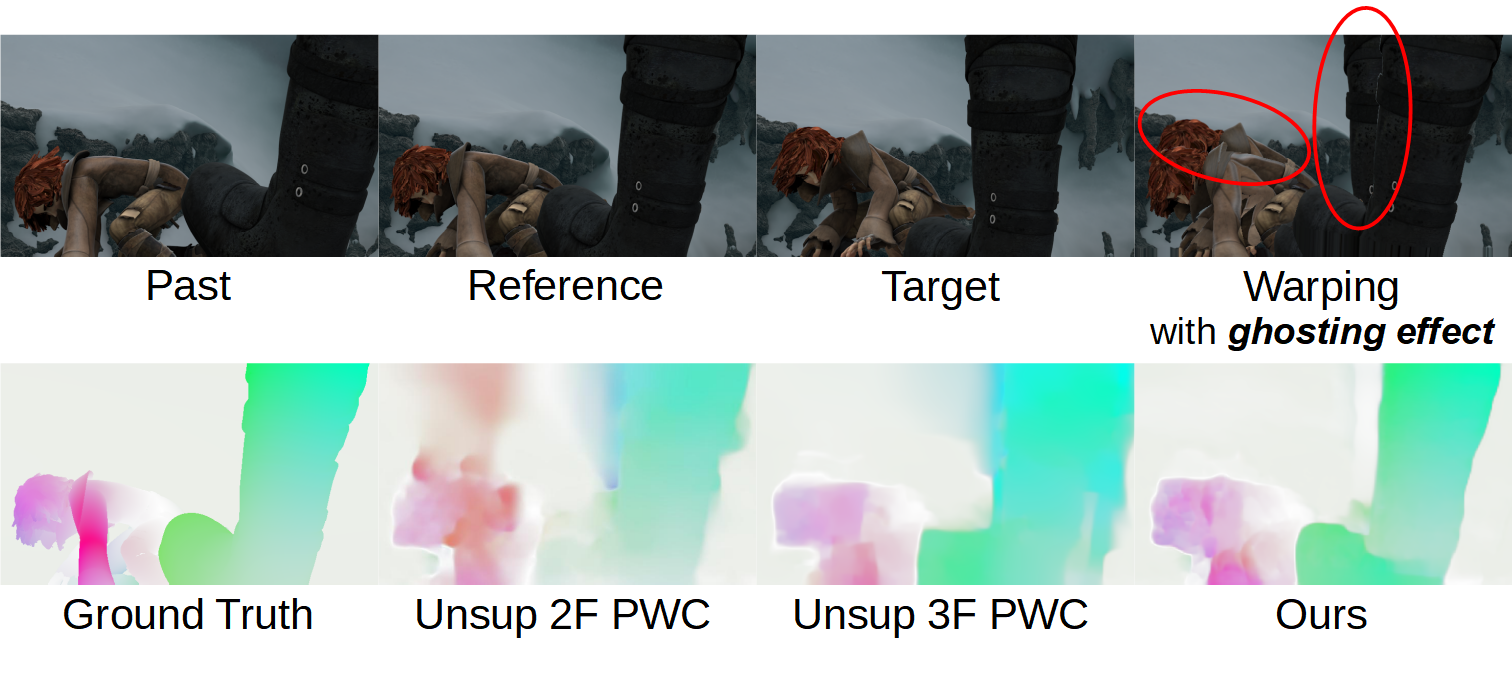
Learning to solve optical flow in an end-to-end fashion from examples is attractive as deep neural networks allow for learning more complex hierarchical flow representations directly from annotated data. However, training such models requires large datasets and obtaining ground truth for real images is challenging as labeling dense correspondences by hand is intractable. Unlike stereo where active sensors such as structured light or laser scanners can be used, no other technology is able to directly deliver optical flow ground truth. Thus, existing approaches train primarily on synthetic data. However, creating data from a distribution that resembles natural scenes is a hard problem on its own.
Unsupervised learning is a promising direction, yet the performance of current unsupervised methods is still limited. In particular, the lack of proper occlusion handling in commonly used data terms constitutes a major source of error. While most optical flow methods process pairs of consecutive frames, more advanced occlusion reasoning can be realized when considering multiple frames.
We propose a framework for unsupervised learning of optical flow and occlusions over multiple frames. More specifically, we exploit the minimal configuration of three frames to strengthen the photometric loss and explicitly reason about occlusions. We demonstrate that our multi-frame, occlusion-sensitive formulation outperforms existing unsupervised two-frame methods and even produces results on par with some fully supervised methods.
Members





Publications