Autonomous Robotic Manipulation
Modeling Top-Down Saliency for Visual Object Search
Interactive Perception
State Estimation and Sensor Fusion for the Control of Legged Robots
Probabilistic Object and Manipulator Tracking
Global Object Shape Reconstruction by Fusing Visual and Tactile Data
Robot Arm Pose Estimation as a Learning Problem
Learning to Grasp from Big Data
Gaussian Filtering as Variational Inference
Template-Based Learning of Model Free Grasping
Associative Skill Memories
Real-Time Perception meets Reactive Motion Generation
Autonomous Robotic Manipulation
Learning Coupling Terms of Movement Primitives
State Estimation and Sensor Fusion for the Control of Legged Robots
Inverse Optimal Control
Motion Optimization
Optimal Control for Legged Robots
Movement Representation for Reactive Behavior
Associative Skill Memories
Real-Time Perception meets Reactive Motion Generation
Optimal Control for Legged Robots
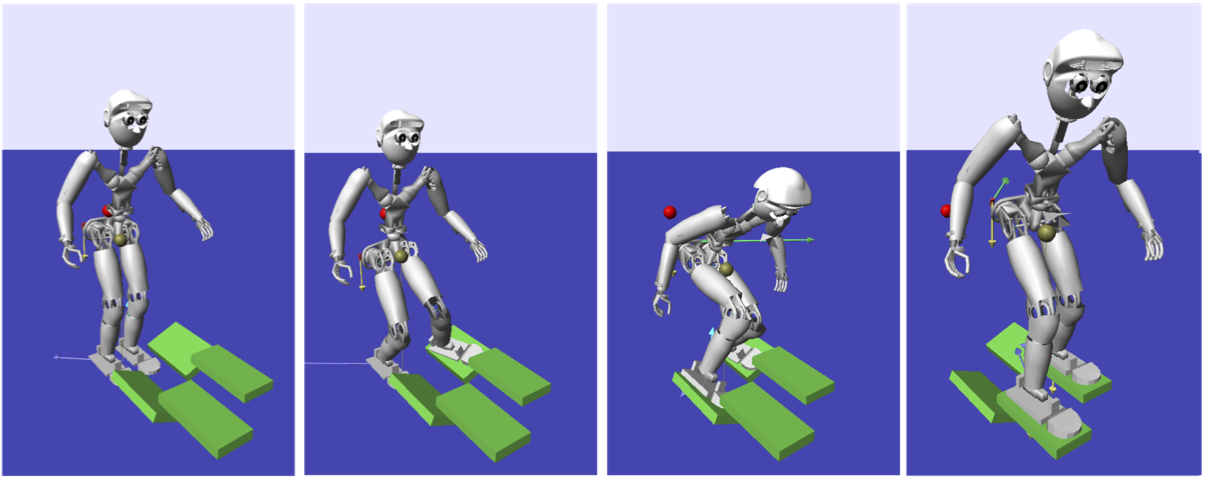
Planning dynamic behaviors for legged robots is a challenging task because the robot is subject to strong dynamic constraints due to its floating base (i.e. it can fall). It needs to take into account intermittent contacts with the environment and apply contact forces in order to move.
In this project, we address the problem of planning dynamic movements for legged robots that take into account the kino-dynamic constraints of the robot. We use optimal control techniques to find solutions that are dynamically feasible and to help synthesize feedback controllers to stabilize these plans. In particular, we are looking at the problem from three different points of view:
- Although legged robots typically consist of many joints, we believe that most of the dynamic behavior of walking or other dynamic tasks can be explained with an underlying (simpler) dynamics model. Thus, we would like to understand what is the level of complexity our models require in order to explain a dynamic behavior well, but at the same time serve in efficient planning and control algorithms.
- A common planning approach on robots with invertible dynamics (e.g. a manipulator) is to generate kinematic trajectories and then in a second step invert the dynamics to generate admissible torque trajectories. However, due to the Newton-Euler equations, a floating-base robot is under-actuated. We extend kinematic planning with trajectory generation on the under-actuated part and couple the two in a common optimization framework. []
- In order to walk or climb, legged robots have to create and break contacts with the environment and apply forces at the contact support. Thus, an important part of our planning stage is finding good contact configurations leaving enough degrees of freedom to the robot for fulfilling its task.
Members







