Lower-leg biomechanics
Human legged locomotion is a physically complex, hybrid load case characterized by lower forces and high actuator speeds during the swing phase, aggressive transitions with small time constants, and high forces as well as rapid leg length accelerations during the stance phase. The transition from stance to swing also exhibits small time constants. These characteristics have led to the hypothesis that the human lower leg features a catapult mechanism, which stores energy during the stance phase and releases it in the brief moment of transition to propel the swing leg forward. Other research suggest flow of energy into trunk oscillations and motions [![]() ]. The catapult mechanism has also been proposed to be responsible for the burst power output at the ankle joint, exceeding the capabilities of the associated muscles alone.
]. The catapult mechanism has also been proposed to be responsible for the burst power output at the ankle joint, exceeding the capabilities of the associated muscles alone.
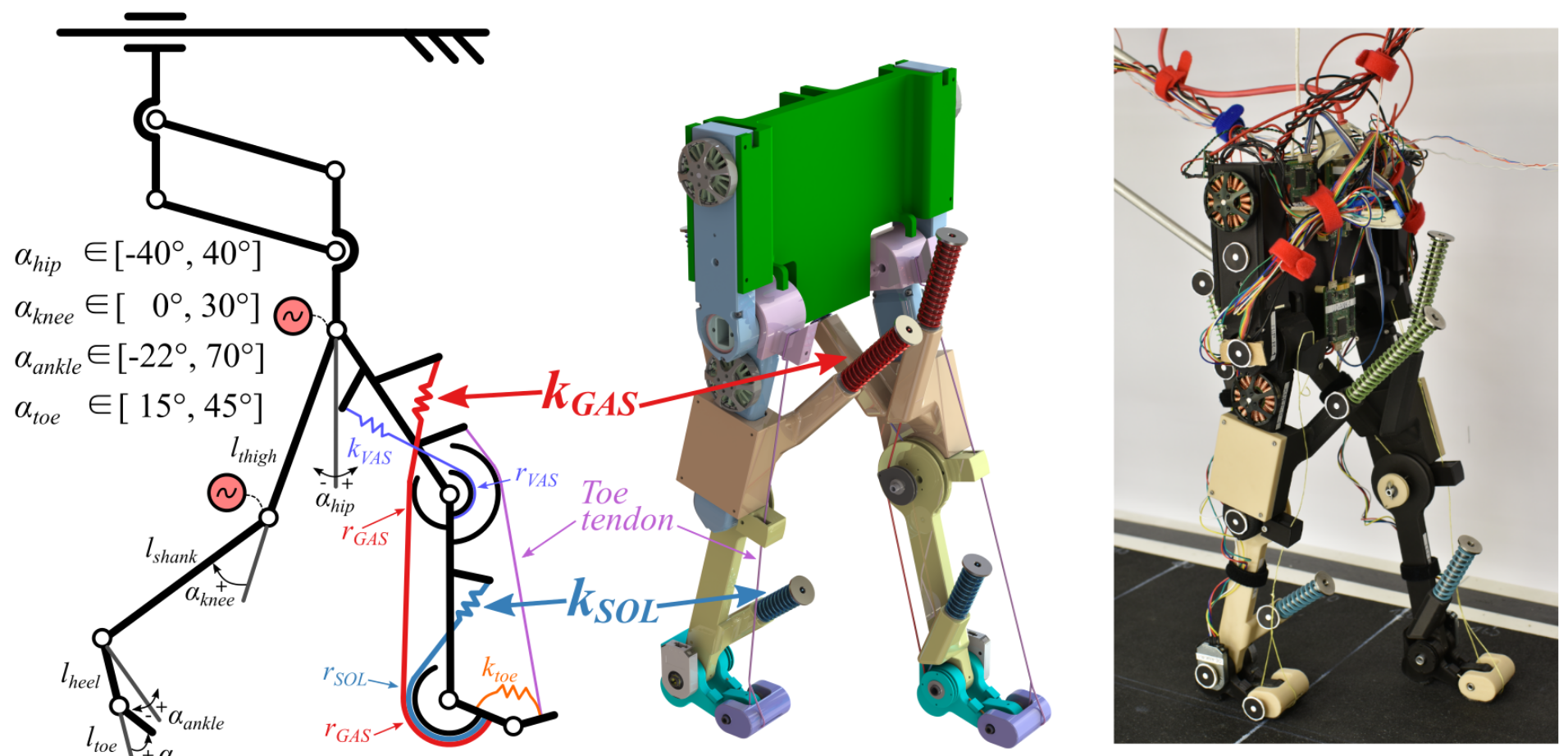
The influence of the structural mechanical properties of muscle-tendon complexes on experimentally observed leg dynamics, as well as the interactions between different muscle groups, is hard to identify in humans. However, it can be effectively studied through robot study parameter variations, leading to the identification of fundamental functional principles. To replicate the catapult function of the human leg robotically, multiple muscle groups are implemented as spring-cable mechanisms: a knee extensor muscle, a monoarticular and a biarticular ankle extensor, and an ankle flexor. The two ankle extensors, together with the connected leg segments, form a force transmission chain with elastic elements. The design and deployment of EcoWalker robots aim to leverage the advantages of this physically efficient mode of locomotion. These advantages are particularly evident in the accurate representation of ground contact dynamics and the realistic modeling of complex force transmission chains involving elastic elements.
The robotic implementation [![]()
![]() ] is particularly valuable as it enables the replication of multiple interacting multiarticular networks of spring-tendons—an aspect that remains challenging in simulations [
] is particularly valuable as it enables the replication of multiple interacting multiarticular networks of spring-tendons—an aspect that remains challenging in simulations [![]() ]. Even small variations in tendon pre-tension settings can lead to significant changes in leg dynamics. With the physical EcoWalker robot, we can record data [
]. Even small variations in tendon pre-tension settings can lead to significant changes in leg dynamics. With the physical EcoWalker robot, we can record data [![]() ] with higher accuracy than is currently achievable in human biomechanics studies.
] with higher accuracy than is currently achievable in human biomechanics studies.
Video