Bioinspired and wearable robotics
A soft, fast and versatile electrohydraulic gripper with capacitive object size detection
A versatile jellyfish-like robotic platform for effective underwater propulsion and manipulation
Electrohydraulic musculoskeletal robotic leg for agile, adaptive, yet energy-efficient locomotion
A multifunctional soft robotic shape display with high-speed actuation, sensing, and control
Cutaneous Electrohydraulic (CUTE) Wearable Devices for Pleasant Broad-Bandwidth Haptic Cues
A soft, fast and versatile electrohydraulic gripper with capacitive object size detection
Zachary Yoder, Daniela Macari, Ingemar Schmidt, Christoph Keplinger et. al., Advanced Functional Materials, 2022 [![]() ]
]
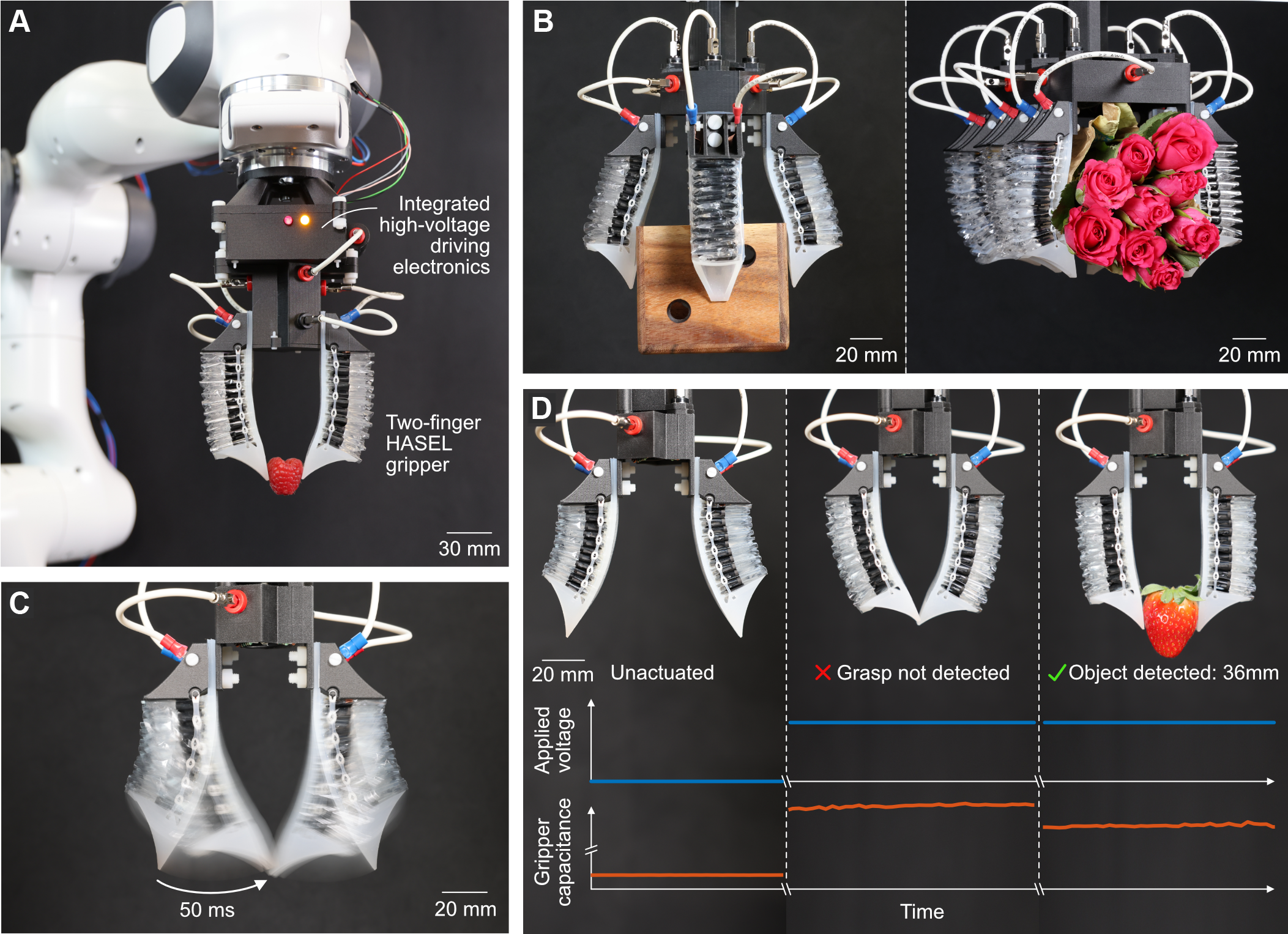
Currently, the most widely used soft grippers are pneumatically driven, as they are simple and effective, but require bulky air compressors that limit their application space and external sensors or computationally expensive vision systems for pick verification.
In this project, we present electrohydraulic, multi-material soft grippers that provide high-speed, electrically-driven actuation and use their conformal, continuum structure simultaneously for actuation and for sensory feedback. The grippers were made from conformal materials, allowing them to achieve increased versatility and reduced complexity of gripping tasks. This was realized through the intelligence embodied in their flexible and conformal structures.
The underlying electrohydraulic actuation principle of our grippers enables fast actuation speed (finger closure in 50 ms), low power consumption (6.5 mW per finger to hold grasp) and successful picking of a wide variety of objects with simple, binary electrical control. The gripper can be driven by integrated high-voltage electronics that are compact – a stark contrast to the bulky compressors typically used for pneumatic grippers. The capacitance of each soft gripper finger changes with respect to displacement, and the capacitance can be used for sensing external stimuli by coupling the high-voltage actuation signal with a low-voltage sensing signal enables the capacitance to be measured in real-time using impedance spectroscopy analysis. This approach requires only the addition of a single resistor for each finger, and enables real-time pick verification and object size detection.
Video
Members




Publications