Bioinspired and wearable robotics
A soft, fast and versatile electrohydraulic gripper with capacitive object size detection
A versatile jellyfish-like robotic platform for effective underwater propulsion and manipulation
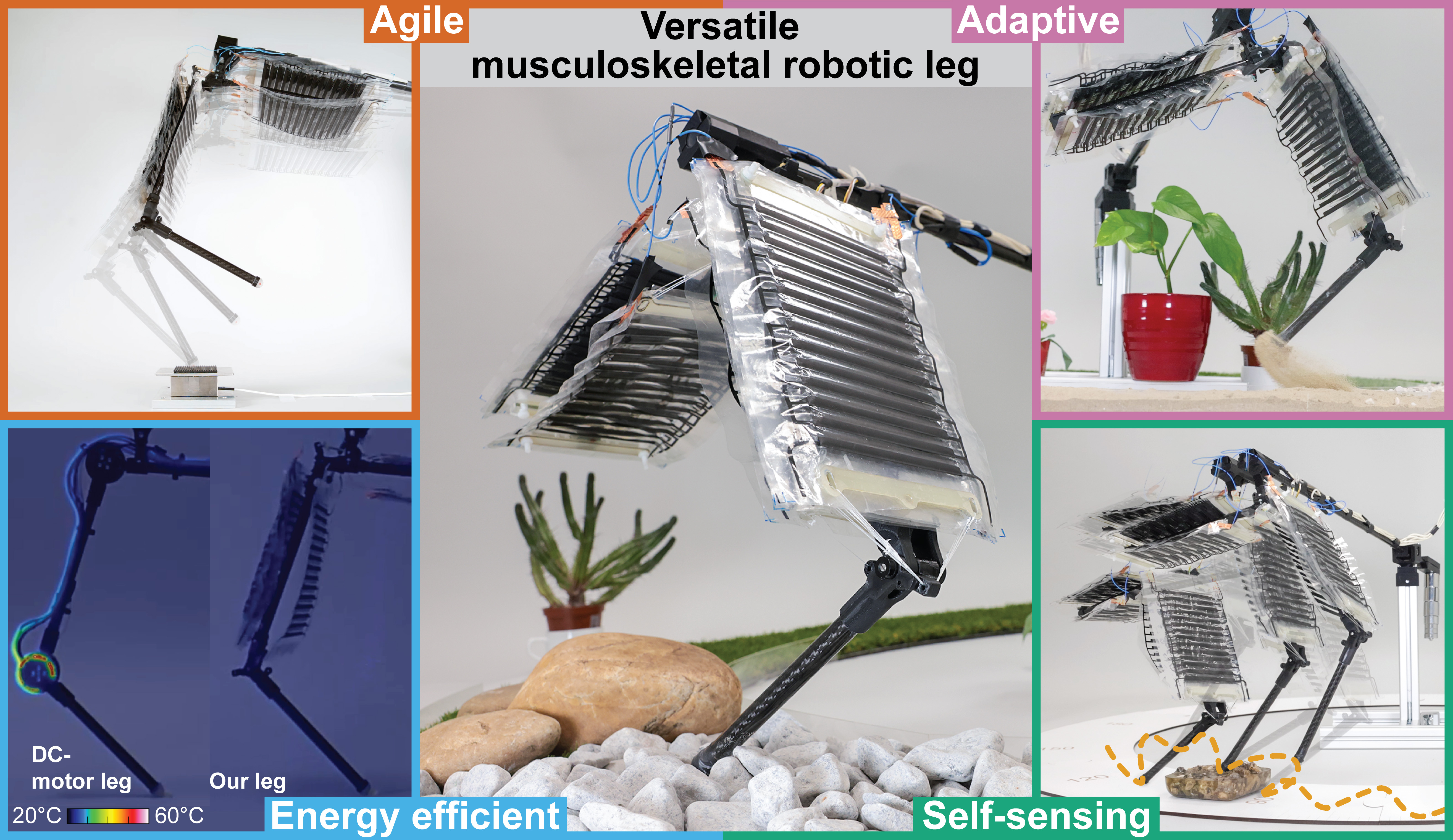
Electrohydraulic musculoskeletal robotic leg for agile, adaptive, yet energy-efficient locomotion
A multifunctional soft robotic shape display with high-speed actuation, sensing, and control
Cutaneous Electrohydraulic (CUTE) Wearable Devices for Pleasant Broad-Bandwidth Haptic Cues
Electrohydraulic musculoskeletal robotic leg for agile, adaptive, yet energy-efficient locomotion
Toshihiko Fukushima, Xingrui Wang, Steven L. Zhang, Johannes Walter, Christoph Keplinger et. al., Nature Communications, 2024 [![]() ]
]
Robotic locomotion in unstructured terrain demands an agile, adaptive, and energy-efficient architecture. To traverse such terrains, legged robots use rigid electromagnetic motors and sensorized drivetrains to adapt to the environment actively. These systems struggle to compete with animals that excel through their agile and effortless motion in natural environments.
In this project, we propose a bio-inspired musculoskeletal leg architecture driven by antagonistic pairs of electrohydraulic artificial muscles.
Our bio-inspired leg was mounted on a boom arm to demonstrate adaptive hopping motions on undulating terrains in an energy-efficient yet agile manner. Utilizing its in-built capability of detecting obstacles through capacitive self-sensing, it performs powerful and agile gait motions beyond 5 Hz and high jumps up to 40 % of the leg height, using only open-loop force control. It features a low cost of transport (0.73), and during static squatting, it consumes only a fraction of the energy (1.2 %) compared to its conventional electromagnetic counterpart. This agile, adaptive, and energy-efficient bioinspired robotic leg will motivate the creation of a new generation of musculoskeletal robots that operate seamlessly and effortlessly in complex environments.
Video
Members





Publications