Autonomous Robotic Manipulation
Modeling Top-Down Saliency for Visual Object Search
Interactive Perception
State Estimation and Sensor Fusion for the Control of Legged Robots
Probabilistic Object and Manipulator Tracking
Global Object Shape Reconstruction by Fusing Visual and Tactile Data
Robot Arm Pose Estimation as a Learning Problem
Learning to Grasp from Big Data
Gaussian Filtering as Variational Inference
Template-Based Learning of Model Free Grasping
Associative Skill Memories
Real-Time Perception meets Reactive Motion Generation
Autonomous Robotic Manipulation
Learning Coupling Terms of Movement Primitives
State Estimation and Sensor Fusion for the Control of Legged Robots
Inverse Optimal Control
Motion Optimization
Optimal Control for Legged Robots
Movement Representation for Reactive Behavior
Associative Skill Memories
Real-Time Perception meets Reactive Motion Generation
Beyond Motion Capture
Accurately capturing human body shape and motion is important for many applications in computer vision and graphics. Traditional motion capture (mocap) focuses on extracting a skeleton from a sparse set of markers. Our work pushes the boundaries of motion capture to use new sensors and to extract richer information about body shape and human movement.
Traditional mocap uses a set of sparse markers placed on the body to estimate skeleton motion. These markers are typically places on parts of the body that move rigidly to try to minimize the effects of soft tissue motion. In this process nuanced information about surface motion is lost and animations using mocap often feel lifeless or eerie. MoSh (Motion and Shape capture) [![]() ] addresses this problem by directly estimating a 3D parametric body model from 3D markers. Given a standard marker set, MoSh simultaneously estimates the marker locations on the 3D model and recovers body shape and pose. By allowing body shape to vary over time, MoSh can also capture the non-rigid motion of soft tissue. From a small set of markers MoSh is able to recover a remarkably accurate 3D model of the body. The motions can then be retargetting to new characters, resulting in realistic, lifelike, animations.
] addresses this problem by directly estimating a 3D parametric body model from 3D markers. Given a standard marker set, MoSh simultaneously estimates the marker locations on the 3D model and recovers body shape and pose. By allowing body shape to vary over time, MoSh can also capture the non-rigid motion of soft tissue. From a small set of markers MoSh is able to recover a remarkably accurate 3D model of the body. The motions can then be retargetting to new characters, resulting in realistic, lifelike, animations.
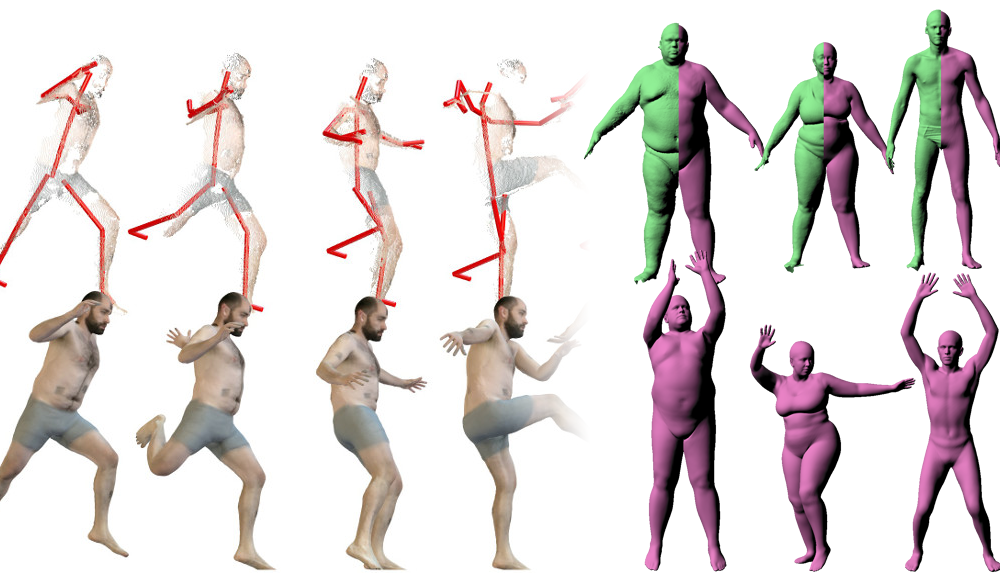
In comparison with mocap, consumer RGB-D devices provide denser observations of the body, but these scans are incomplete (taken from a single view) and noisy. By using RGB-D sequences of bodies in motion, we can extract more detailed information about body shape and motion [![]() ]. To do so, we introduce a multi-resolution body model and exploit time continuity of human motion and RGB appearance to estimate accurate body shape, pose and appearance. The approach can track arbitrary challenging motions, and extracts highly realistic 3D textured avatars with an accuracy rivaling high-cost laser scanners.
]. To do so, we introduce a multi-resolution body model and exploit time continuity of human motion and RGB appearance to estimate accurate body shape, pose and appearance. The approach can track arbitrary challenging motions, and extracts highly realistic 3D textured avatars with an accuracy rivaling high-cost laser scanners.
Members







Publications