Multi-view Stereo
Dense 3D reconstruction from RGB images is a highly ill-posed problem due to occlusions, textureless or reflective surfaces, varied scene geometry, and spatial discontinuities. We propose algorithms that bring in various types of geometric information that imposes long-range, or semantic, knowlege to address these ambiguities.
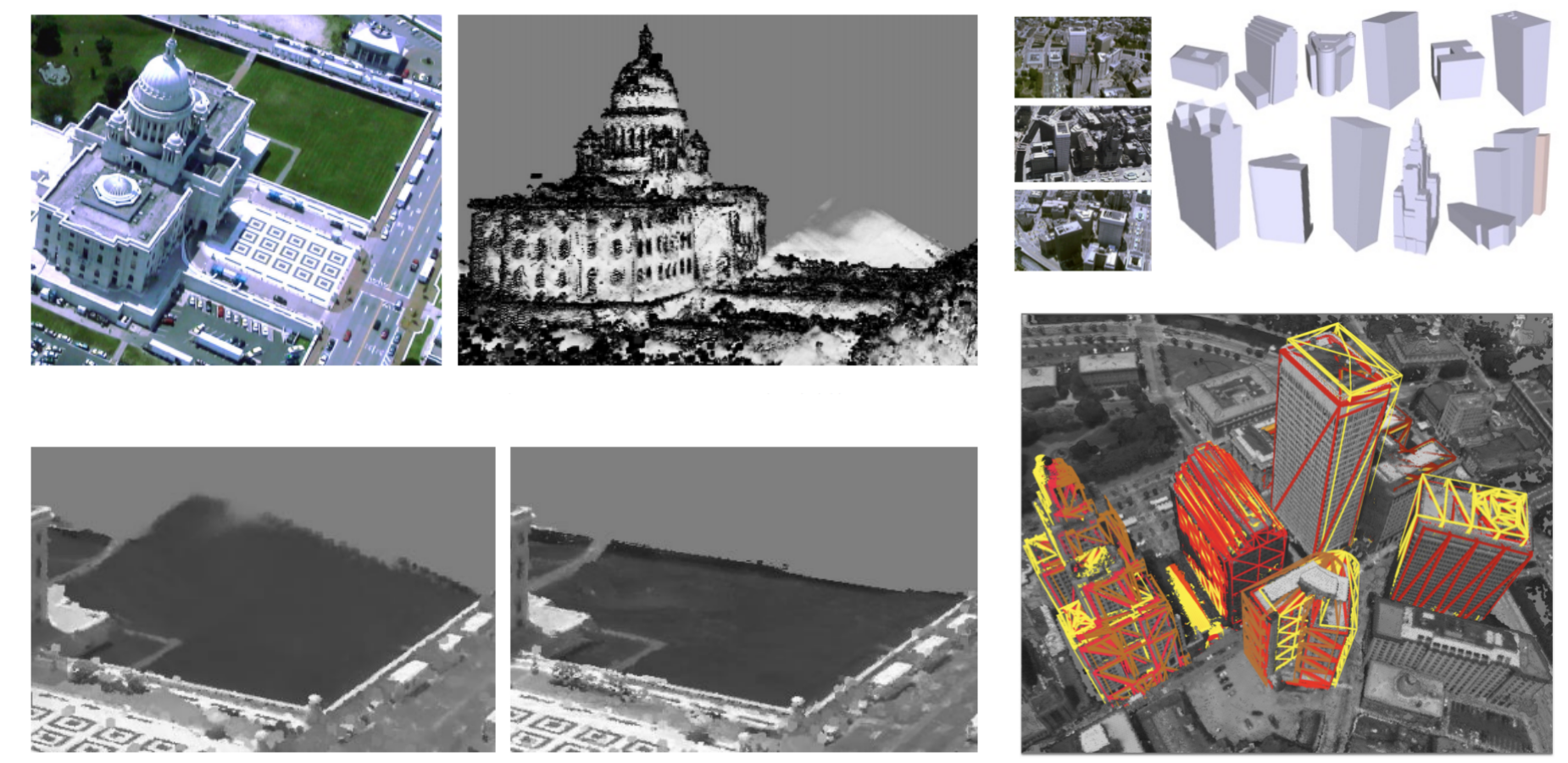
Our work on Patches, Planes and Probabilities [![]() ] proposed a novel Markov random field model based on ray potentials and a non-local structured prior for volumetric multi-view 3D reconstruction. It was inspired by the planar nature of many elements in man-made environments, i.e., 3D range images of generic scenes can be approximated by piecewise smooth regions with discontinuities at object boundaries. The prior encourages planarity within image segments and regularizes over large voxel neighborhoods. The method was able to resolve reconstruction ambiguities of textureless and partially reflective surfaces and achieved state-of-the-art results in reconstruction accuracy for highly challenging aerial datasets.
] proposed a novel Markov random field model based on ray potentials and a non-local structured prior for volumetric multi-view 3D reconstruction. It was inspired by the planar nature of many elements in man-made environments, i.e., 3D range images of generic scenes can be approximated by piecewise smooth regions with discontinuities at object boundaries. The prior encourages planarity within image segments and regularizes over large voxel neighborhoods. The method was able to resolve reconstruction ambiguities of textureless and partially reflective surfaces and achieved state-of-the-art results in reconstruction accuracy for highly challenging aerial datasets.
In our work on Semantic Multi-view Stereo [![]() ], we address ambiguities in 3D reconstruction by presenting a probabilistic approach that integrates object-level shape priors with image-based 3D reconstruction. Our method can infer not only a dense 3D reconstruction of the scene but the existence and precise 3D pose of the objects in it as well. Thus our method not only yields an accurate mapping of the environment but also a semantic understanding in terms of the objects in the environment. The proposed prior allows for powerful regularization that can resolve large ambiguities common in 3D reconstruction. For instance, our shape prior can help reconstruct the back-side of an object even though it is occluded in the images.
], we address ambiguities in 3D reconstruction by presenting a probabilistic approach that integrates object-level shape priors with image-based 3D reconstruction. Our method can infer not only a dense 3D reconstruction of the scene but the existence and precise 3D pose of the objects in it as well. Thus our method not only yields an accurate mapping of the environment but also a semantic understanding in terms of the objects in the environment. The proposed prior allows for powerful regularization that can resolve large ambiguities common in 3D reconstruction. For instance, our shape prior can help reconstruct the back-side of an object even though it is occluded in the images.
Members



Publications