Reinforcement Learning and Control
Model-based Reinforcement Learning and Planning
Object-centric Self-supervised Reinforcement Learning
Self-exploration of Behavior
Causal Reasoning in RL
Equation Learner for Extrapolation and Control
Intrinsically Motivated Hierarchical Learner
Regularity as Intrinsic Reward for Free Play
Curious Exploration via Structured World Models Yields Zero-Shot Object Manipulation
Natural and Robust Walking from Generic Rewards
Goal-conditioned Offline Planning
Offline Diversity Under Imitation Constraints
Learning Diverse Skills for Local Navigation
Learning Agile Skills via Adversarial Imitation of Rough Partial Demonstrations
Combinatorial Optimization as a Layer / Blackbox Differentiation
Object-centric Self-supervised Reinforcement Learning
Symbolic Regression and Equation Learning
Representation Learning
Stepsize adaptation for stochastic optimization
Probabilistic Neural Networks
Learning with 3D rotations: A hitchhiker’s guide to SO(3)
FlowCap
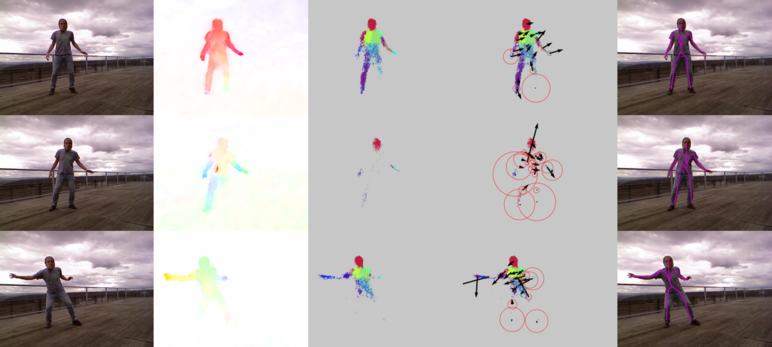
We estimate 2D human pose from video using only optical flow. The key insight is that dense optical flow can provide information about 2D body pose. Like range data, flow is largely invariant to appearance but unlike depth it can be directly computed from monocular video. We demonstrate that body parts can be detected from dense flow using the same random forest approach used by the Microsoft Kinect. Unlike range data, however, when people stop moving, there is no optical flow and they effectively disappear. To address this, our FlowCap method uses a Kalman filter to propagate body part positions and velocities over time and a regression method to predict 2D body pose from part centers. No range sensor is required and FlowCap estimates 2D human pose from monocular video sources containing human motion. Such sources include hand-held phone cameras and archival television video. We demonstrate 2D body pose estimation in a range of scenarios and show that the method works with real-time optical flow. The results suggest that optical flow shares invariances with range data that, when complemented with tracking, make it valuable for pose estimation. Please visit the project webpage http://flowcap.is.tue.mpg.de for more information and to gain access to the training data.
Video
Members



Publications