Reinforcement Learning and Control
Model-based Reinforcement Learning and Planning
Object-centric Self-supervised Reinforcement Learning
Self-exploration of Behavior
Causal Reasoning in RL
Equation Learner for Extrapolation and Control
Intrinsically Motivated Hierarchical Learner
Regularity as Intrinsic Reward for Free Play
Curious Exploration via Structured World Models Yields Zero-Shot Object Manipulation
Natural and Robust Walking from Generic Rewards
Goal-conditioned Offline Planning
Offline Diversity Under Imitation Constraints
Learning Diverse Skills for Local Navigation
Learning Agile Skills via Adversarial Imitation of Rough Partial Demonstrations
Combinatorial Optimization as a Layer / Blackbox Differentiation
Object-centric Self-supervised Reinforcement Learning
Symbolic Regression and Equation Learning
Representation Learning
Stepsize adaptation for stochastic optimization
Probabilistic Neural Networks
Learning with 3D rotations: A hitchhiker’s guide to SO(3)
Lie Bodies
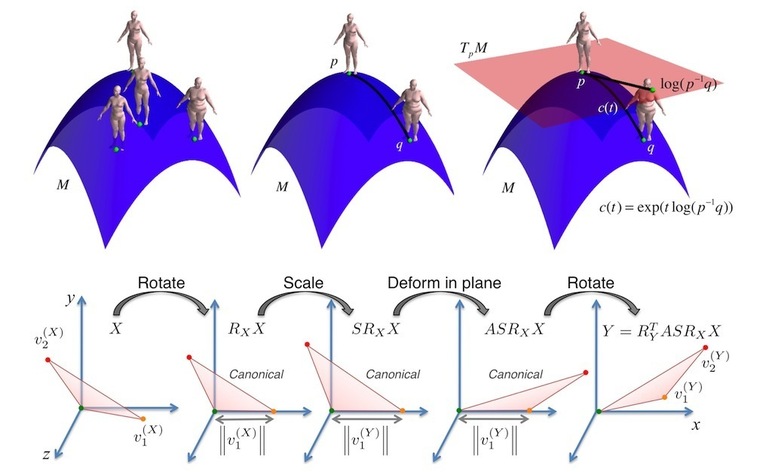
Top row: Body manifold. Left: Human shapes as points on a manifold, M. Every point represents a deformation from a template. Center: Distance between shapes p and q is measured via a geodesic distance; i.e. the length of the path between them along M. Right: The tangent space at p, denoted by TpM, is a vector space.
Bottom row: Triangle deformation. Deforming X = [v1X , v2X ] to Y = [v1Y , v2Y ]. Only 6 Degrees of Freedom are required. The deformation can be seen as an action of a novel Lie group.
Three-dimensional object shape is commonly represented in terms of deformations of a triangular mesh from an exemplar shape. In particular, statistical generative models of human shape deformation are widely used in computer vision, graphics, ergonomics, and anthropometry. Existing models, however, are based on a Euclidean representation of shape deformations. In contrast, we argue that shape has a manifold structure: For example, averaging the shape deformations for two people does not necessarily yield a deformation corresponding to a valid human shape, nor does the Euclidean difference of these two deformations provide a meaningful measure of shape dissimilarity. Consequently, we define a novel manifold for shape representation, with emphasis on body shapes, using a new Lie group of deformations. This has several advantages.
First, we define triangle deformations exactly, removing non-physical deformations and redundant degrees of freedom common to previous methods.
Second, the Riemannian structure of Lie Bodies enables a more meaningful definition of body shape similarity by measuring distance between bodies on the manifold of body shape deformations.
Third, the group structure allows the valid composition of deformations. This is important for models that factor body shape deformations into multiple causes or represent shape as a linear combination of basis shapes. Similarly, interpolation between two mesh deformations results in a meaningful third deformation.
Finally, body shape variation is modeled using statistics on manifolds. Instead of modeling Euclidean shape variation with Principal Component Analysis we capture shape variation on the manifold using Principal Geodesic Analysis.
Our experiments show consistent visual and quantitative advantages of Lie Bodies over traditional Euclidean models of shape deformation and our representation can be easily incorporated into existing methods.
This project is part of a larger effort that brings together statistics and geometry to model statistics on manifolds. Our research on manifold-valued statistics addresses the problem of modeling statistics in constrained feature spaces. We try to find the geometrically most natural representations that respect the constraints; e.g. by modeling the data as belonging to a Lie group or a Riemannian manifold. We take a geometric approach as this keeps the focus on good distance measures, which are essential for good statistics.
Video
Members



Publications