VP above or below? A new perspective on the story of the virtual point
2020
Poster
dlg
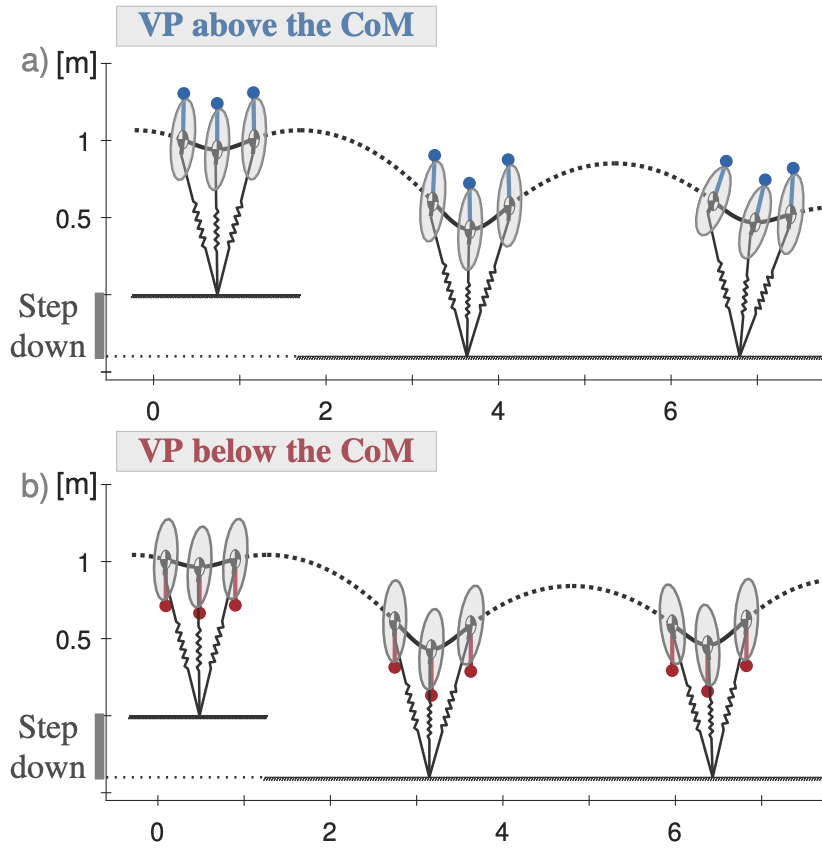
The spring inverted pendulum model with an extended trunk (TSLIP) is widely used to investigate the postural stability in bipedal locomotion [1, 2]. The challenge of the model is to define a hip torque that generates feasible gait patterns while stabilizing the floating trunk. The virtual point (VP) method is proposed as a simplified solution, where the hip torque is coupled to the passive compliant leg force via a virtual point. This geometric coupling is based on the assumption that the instantaneous ground reaction forces of the stance phase (GRF) intersect at a single virtual point.
| Author(s): | Özge Drama and Alexander Badri-Spröwitz |
| Year: | 2020 |
| Month: | May |
| Department(s): | Dynamische Lokomotion |
| Bibtex Type: | Poster (poster) |
| Paper Type: | Conference |
| Digital: | True |
| Event Name: | Dynamic Walking |
| URL: | https://www.seas.upenn.edu/~posa/DynamicWalking2020/601-869-1-RV.pdf |
| Attachments: |
Poster
Abstract |
|
BibTex @poster{drama2020a,
title = {VP above or below? A new perspective on the story of the virtual point},
author = {Drama, Özge and Badri-Spr{\"o}witz, Alexander},
month = may,
year = {2020},
doi = {},
url = {https://www.seas.upenn.edu/~posa/DynamicWalking2020/601-869-1-RV.pdf},
month_numeric = {5}
}
|
|