Minsight: Learning-based tactile sensing for robotics
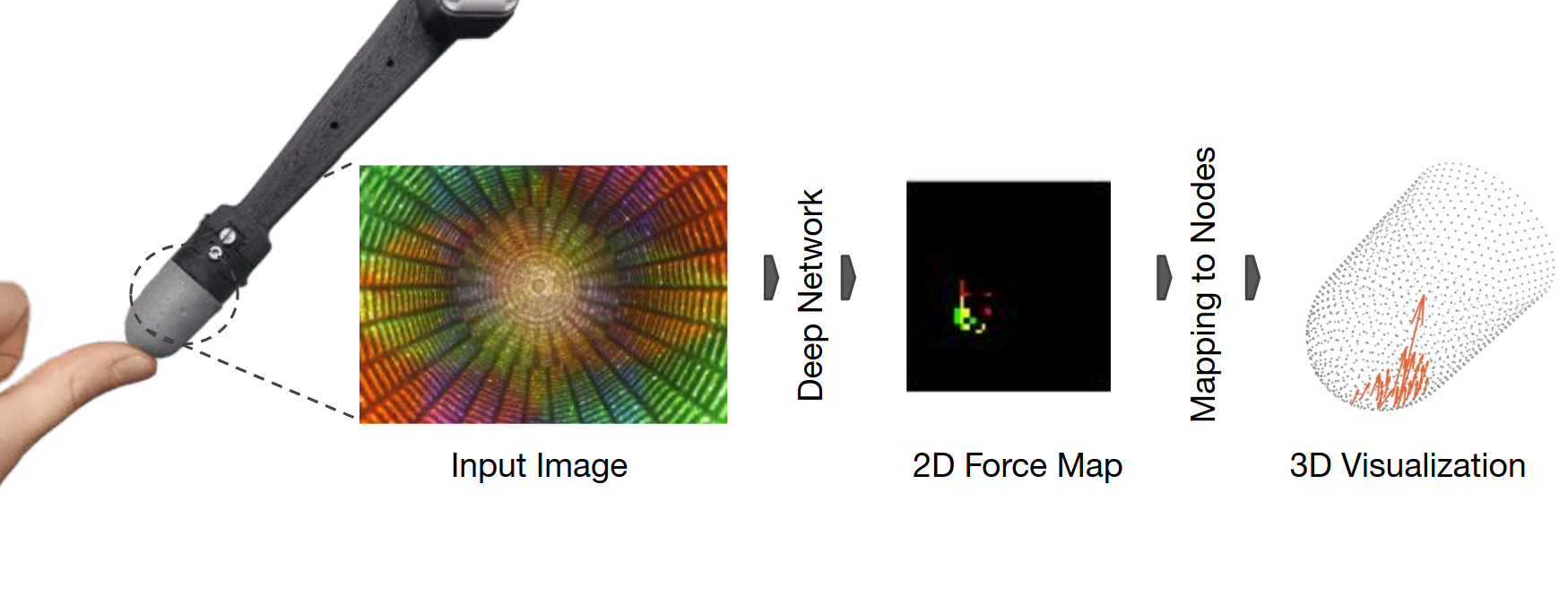
Autonomous robots have the potential to become dexterous and work flexibly together with humans. To achieve this goal, their hardware needs to become more robust and provide richer sensory feedback, while their learning algorithms need to become more data-efficient and safety-aware. A clear shortcoming of current commodity robotic hardware is the complete lack or low quality of the tactile sensations it can acquire. In contrast, humans have a rich sense of touch and use it constantly — mostly subconsciously. In fact, if haptic perception is impaired, dexterous manipulation becomes very challenging or even impossible. High-resolution haptic sensing similar to the human fingertip can enable robots to execute delicate manipulation tasks like picking up small objects, inserting a key into a lock, or handing a full cup of coffee to a human. As part of this project, we present Minsight, a fingertip-sized vision-based tactile sensor, capable of sensing forces on its omnidirectional sensing surface down to 0.05 N with an update rate of 60 Hz.
Members



Publications