Reinforcement Learning and Control
Model-based Reinforcement Learning and Planning
Object-centric Self-supervised Reinforcement Learning
Self-exploration of Behavior
Causal Reasoning in RL
Equation Learner for Extrapolation and Control
Intrinsically Motivated Hierarchical Learner
Regularity as Intrinsic Reward for Free Play
Curious Exploration via Structured World Models Yields Zero-Shot Object Manipulation
Natural and Robust Walking from Generic Rewards
Goal-conditioned Offline Planning
Offline Diversity Under Imitation Constraints
Learning Diverse Skills for Local Navigation
Learning Agile Skills via Adversarial Imitation of Rough Partial Demonstrations
Combinatorial Optimization as a Layer / Blackbox Differentiation
Object-centric Self-supervised Reinforcement Learning
Symbolic Regression and Equation Learning
Representation Learning
Stepsize adaptation for stochastic optimization
Probabilistic Neural Networks
Learning with 3D rotations: A hitchhiker’s guide to SO(3)
Probabilistic Solvers for Ordinary Differential Equations
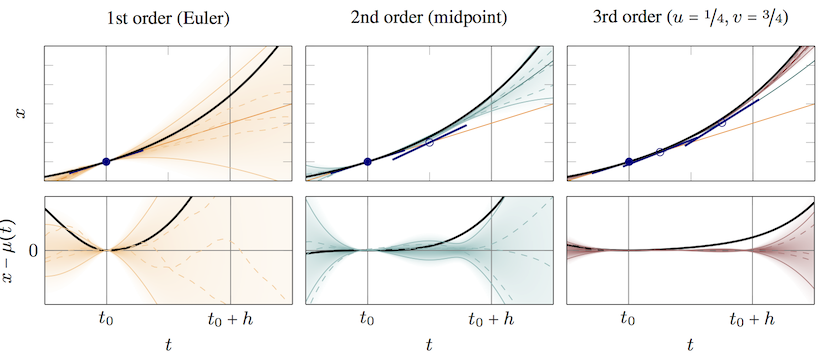
Solvers for ordinary differential equations (ODEs) belong to the best-studied algorithms of numerical mathematics. An ODE is an implicit statement about the relationship of a curve $x:\mathbb{R}_{\geq 0}\to\mathbb{R}^N$ to its derivative, in the form $x'(t) = f(x(t),t)$, where $x'$ is the derivative of curve, and $f$ is some function. To identify a unique solution of a particular ODE, it is typically also necessary to provide additional statements about the curve, such as its initial value $x(t_0)=x_0$. An ODE solver is a mathematical rule that maps function and initial value, $(f,x_0)$ to an estimate $x(t)$ for the solution curve. Good solvers have certain analytical guarantees about this estimate, such as the fact that its deviation from the true solution is of a high polynomial order in the step size used by the algorithms to discretize the ODE.
One of the main theoretical contributions of the group is the development of probabilistic versions of these solvers. In several works, we established a class of solvers for initial value problems that generalize classic solvers by taking as inputs Gaussian distributions $\mathcal{N}(x(t_0);x_0,\Psi)$, $\mathcal{GP}(f;\hat{f},\Sigma)$ over the initial value and vector field, and return a Gaussian process posterior $\mathcal{GP}(x;m,k)$ over the solution. We were able to show that these methods
- have the same (linear) computational computational complexity in solver's step-size $h$ as classic methods [
 ] (they are Bayesian filters)
] (they are Bayesian filters) - can inherit the famous local and global polynomial convergence rates of classic solvers [] (i.e. $\|m-x\|\leq Ch^q$ for $q\geq 1$)
- produce posterior variance estimates that are calibrated worst-case error estimates [] (i.e. $\|m-x\|^2\leq Ck$). In Short, they produce meaningful uncertainty
- are in fact a generalization of certain famous classic ODE solvers (namely they reduce to explicit single-step Runge Kutta methods and multi-step Nordsieck methods in the limit of uninformative prior and steady-state operation, respectively. In practical operation, they offer a third, novel type of solver) []
- they can be generalized to produce non-Gaussian, nonparametric output while retaining many of the above properties [].
Together, these results provide a rich and reliable new theory for probabilistic simulation that current ongoing research projects are seeking to leverage to speed up structured simulation problems inside of machine learning algorithms.
Members

Publications