Embodied Vision
Members
Publications
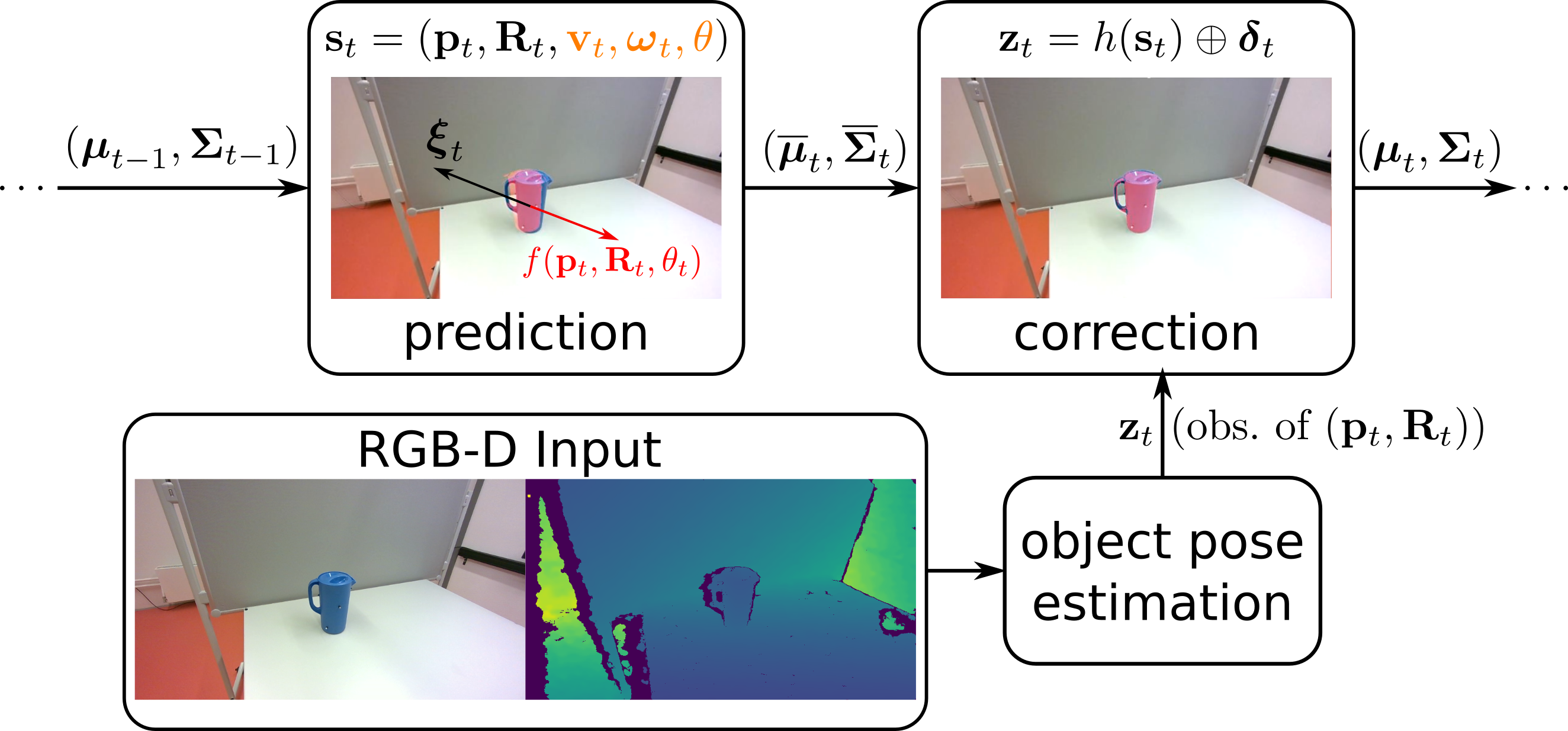
EKFPhys [ ] filters object pose and friction parameter from deep learning-based object pose estimates in RGB-D images and using a differentiable physics simulation as state-transition model. ©~IEEE. Reprinted, with permission, from [].
] filters object pose and friction parameter from deep learning-based object pose estimates in RGB-D images and using a differentiable physics simulation as state-transition model. ©~IEEE. Reprinted, with permission, from [].
Differentiable Physics for Scene Understanding
In our work EKFPhys [], we use state-of-the-art 3D object detection and pose estimation (Lipson et al., Coupled Iterative Refinement for 6D Multi-Object Pose Estimation, CVPR 2022) to detect objects with known shape and texture in RGB-D images. The 6-DoF object pose (3D rotation and translation) is filtered together with the object's Coulomb friction parameter with the underlying surface using an extended Kalman filter (EKF). The filter uses the detected object poses as observations and the differentiable physics simulation as state-transition model. We propose novel synthetic and real benchmark datasets and evaluate the performance of our approach in estimating object pose and friction parameters.
n/a
Members



Publications
Embodied Vision
Conference Paper
Physics-Based Rigid Body Object Tracking and Friction Filtering From RGB-D Videos
Kandukuri, R. K., Strecke, M., Stueckler, J.
In Proceedings of the International Conference on 3D Vision (3DV), 2024 (Published)
preprint
supplemental video
dataset
DOI
URL
BibTeX
Embodied Vision
Learning and Dynamical Systems
Empirical Inference
Conference Paper
Black-Box vs. Gray-Box: A Case Study on Learning Table Tennis Ball Trajectory Prediction with Spin and Impacts
Achterhold, J., Tobuschat, P., Ma, H., Büchler, D., Muehlebach, M., Stueckler, J.
In Conference on Learning for Dynamics and Control, 211:878-890, Proceedings of Machine Learning Research, (Editors: Nikolai Matni, Manfred Morari and George J. Pappa), PMLR, June 2023 (Published)
preprint
code
URL
BibTeX
Embodied Vision
Conference Paper
DiffSDFSim: Differentiable Rigid-Body Dynamics With Implicit Shapes
Strecke, M., Stückler, J.
In 2021 International Conference on 3D Vision (3DV 2021) , :96-105 , International Conference on 3D Vision (3DV 2021) , December 2021 (Published)
Project website
Preprint
Code
DOI
URL
BibTeX
Embodied Vision
Article
Physical Representation Learning and Parameter Identification from Video Using Differentiable Physics
Kandukuri, R., Achterhold, J., Moeller, M., Stueckler, J.
International Journal of Computer Vision, 130:3-16, 2021 (Published)
DOI
URL
BibTeX
Embodied Vision
Conference Paper
Learning to Identify Physical Parameters from Video Using Differentiable Physics
Kandukuri, R., Achterhold, J., Moeller, M., Stueckler, J.
Proc. of the 42th German Conference on Pattern Recognition (GCPR), 2020, GCPR 2020 Honorable Mention, preprint https://arxiv.org/abs/2009.08292 (Published)
URL
BibTeX