Reinforcement Learning and Control
Model-based Reinforcement Learning and Planning
Object-centric Self-supervised Reinforcement Learning
Self-exploration of Behavior
Causal Reasoning in RL
Equation Learner for Extrapolation and Control
Intrinsically Motivated Hierarchical Learner
Regularity as Intrinsic Reward for Free Play
Curious Exploration via Structured World Models Yields Zero-Shot Object Manipulation
Natural and Robust Walking from Generic Rewards
Goal-conditioned Offline Planning
Offline Diversity Under Imitation Constraints
Learning Diverse Skills for Local Navigation
Learning Agile Skills via Adversarial Imitation of Rough Partial Demonstrations
Combinatorial Optimization as a Layer / Blackbox Differentiation
Object-centric Self-supervised Reinforcement Learning
Symbolic Regression and Equation Learning
Representation Learning
Stepsize adaptation for stochastic optimization
Probabilistic Neural Networks
Learning with 3D rotations: A hitchhiker’s guide to SO(3)
Learning with 3D rotations: A hitchhiker’s guide to SO(3)
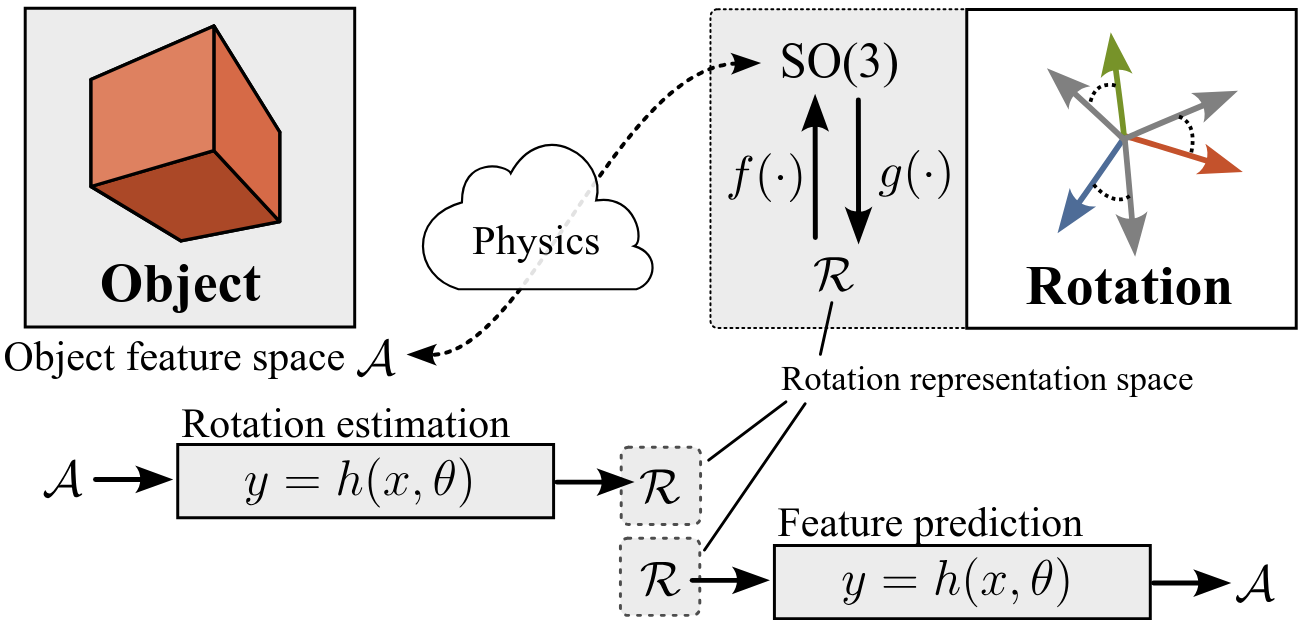
Many settings in machine learning require the selection of a rotation representation. However, choosing a suitable representation from the many available options is challenging. This paper acts as a survey and guide through rotation representations. We walk through their properties that harm or benefit deep learning with gradient-based optimization. By consolidating insights from rotation-based learning, we provide a comprehensive overview of learning functions with rotation representations. We provide guidance on selecting representations based on whether rotations are in the model’s input or output and whether the data primarily comprises small angles.
Members



Publications