Reinforcement Learning and Control
Model-based Reinforcement Learning and Planning
Object-centric Self-supervised Reinforcement Learning
Self-exploration of Behavior
Causal Reasoning in RL
Equation Learner for Extrapolation and Control
Intrinsically Motivated Hierarchical Learner
Regularity as Intrinsic Reward for Free Play
Curious Exploration via Structured World Models Yields Zero-Shot Object Manipulation
Natural and Robust Walking from Generic Rewards
Goal-conditioned Offline Planning
Offline Diversity Under Imitation Constraints
Learning Diverse Skills for Local Navigation
Learning Agile Skills via Adversarial Imitation of Rough Partial Demonstrations
Combinatorial Optimization as a Layer / Blackbox Differentiation
Object-centric Self-supervised Reinforcement Learning
Symbolic Regression and Equation Learning
Representation Learning
Stepsize adaptation for stochastic optimization
Probabilistic Neural Networks
Learning with 3D rotations: A hitchhiker’s guide to SO(3)
The effect of muscles in Learning Behavior
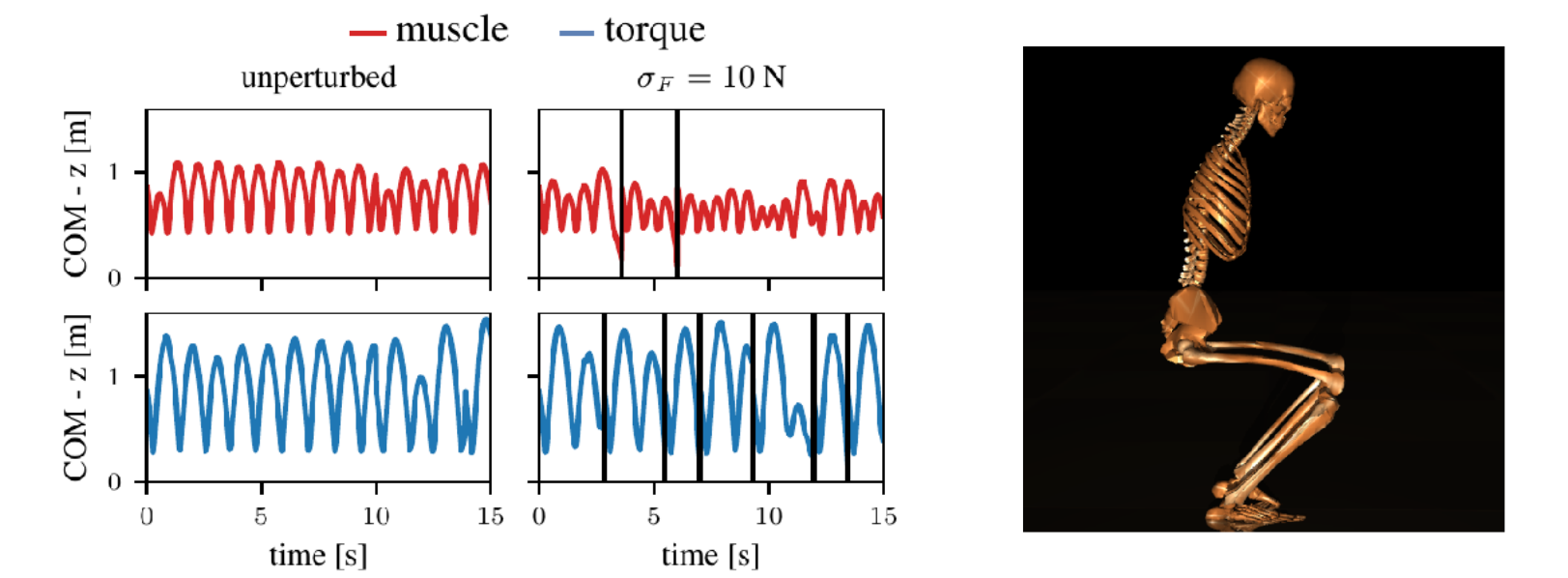
Humans are able to outperform robots in terms of robustness, versatility, and learning of new tasks in a wide variety of movements. We hypothesize that highly nonlinear muscle dynamics play a large role in providing inherent stability, which is favorable to learning. While recent advances have been made in applying modern learning techniques to muscle-actuated systems both in simulation as well as in robotics, so far, no detailed analysis has been performed to show the benefits of muscles in this setting. Our study closes this gap by investigating core robotics challenges and comparing the performance of different actuator morphologies in terms of data-efficiency, hyperparameter sensitivity, and robustness.
Members


Publications