Human Pose, Shape and Action
3D Pose from Images
2D Pose from Images
Beyond Motion Capture
Action and Behavior
Body Perception
Body Applications
Pose and Motion Priors
Clothing Models (2011-2015)
Reflectance Filtering
Learning on Manifolds
Markerless Animal Motion Capture
Multi-Camera Capture
2D Pose from Optical Flow
Body Perception
Neural Prosthetics and Decoding
Part-based Body Models
Intrinsic Depth
Lie Bodies
Layers, Time and Segmentation
Understanding Action Recognition (JHMDB)
Intrinsic Video
Intrinsic Images
Action Recognition with Tracking
Neural Control of Grasping
Flowing Puppets
Faces
Deformable Structures
Model-based Anthropometry
Modeling 3D Human Breathing
Optical flow in the LGN
FlowCap
Smooth Loops from Unconstrained Video
PCA Flow
Efficient and Scalable Inference
Motion Blur in Layers
Facade Segmentation
Smooth Metric Learning
Robust PCA
3D Recognition
Object Detection
Capturing Contact
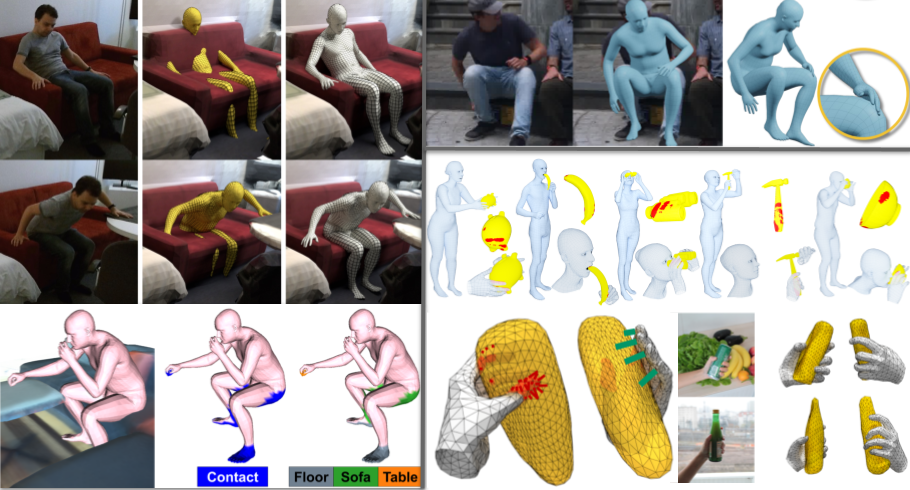
Understanding and modeling human behavior requires capturing humans moving in, and interacting with, the world. Standard 3D human body pose and shape (HPS) methods estimate bodies in isolation from the objects and people around them. The results are often physically implausible and lack key information. We view contact as central to understanding behavior and therefore essential in human motion capture. Our goal is to capture people in the context of the world where contact is as important as pose.
To study this, we captured the PROX dataset [![]() ] using 3D scene scans and an RGB-D sensor to obtain pseudo ground truth poses with physically meaningful contact. Knowing the 3D scene enables more accurate HPS estimation from monocular RGB images by exploiting contact and interpenetration contraints.
] using 3D scene scans and an RGB-D sensor to obtain pseudo ground truth poses with physically meaningful contact. Knowing the 3D scene enables more accurate HPS estimation from monocular RGB images by exploiting contact and interpenetration contraints.
Using the body-scene contact data from PROX, POSA [![]() ] learns a generative model of contact for the vertices of a posed body. We use this body-centric prior in monocular pose estimation to encourage the estimated body to have physically and semantically meaningful scene contacts.
] learns a generative model of contact for the vertices of a posed body. We use this body-centric prior in monocular pose estimation to encourage the estimated body to have physically and semantically meaningful scene contacts.
TUCH [![]() ] explores HPS estimation with self-contact. We create novel datasets of images with known 3D contact poses or contact labels. Using these, and a contact-aware version of SMPLify-X [
] explores HPS estimation with self-contact. We create novel datasets of images with known 3D contact poses or contact labels. Using these, and a contact-aware version of SMPLify-X [![]() ], we train a regression network using a modified version of SPIN [
], we train a regression network using a modified version of SPIN [![]() ]. Not only is TUCH more accurate for images with self-contact, but also for non-contact poses.
]. Not only is TUCH more accurate for images with self-contact, but also for non-contact poses.
To learn to regress 3D hands and objects from an image, we created the ObMan dataset by extending a robotic grasp simulator to MANO [![]() ] and rendering images of hands grasping many objects. We trained a network to regress both object and hand shape, while encouraging contact and avoiding interpenetration.
] and rendering images of hands grasping many objects. We trained a network to regress both object and hand shape, while encouraging contact and avoiding interpenetration.
To address detailed whole-body contact during object manipulation we used mocap to create the GRAB dataset [![]() ]. GRAB goes beyond previous hand-centric datasets to capture actions like drinking where contact occurs between a cup and fingers as well as the lips.
]. GRAB goes beyond previous hand-centric datasets to capture actions like drinking where contact occurs between a cup and fingers as well as the lips.
Members













Publications