Human Pose, Shape and Action
3D Pose from Images
2D Pose from Images
Beyond Motion Capture
Action and Behavior
Body Perception
Body Applications
Pose and Motion Priors
Clothing Models (2011-2015)
Reflectance Filtering
Learning on Manifolds
Markerless Animal Motion Capture
Multi-Camera Capture
2D Pose from Optical Flow
Body Perception
Neural Prosthetics and Decoding
Part-based Body Models
Intrinsic Depth
Lie Bodies
Layers, Time and Segmentation
Understanding Action Recognition (JHMDB)
Intrinsic Video
Intrinsic Images
Action Recognition with Tracking
Neural Control of Grasping
Flowing Puppets
Faces
Deformable Structures
Model-based Anthropometry
Modeling 3D Human Breathing
Optical flow in the LGN
FlowCap
Smooth Loops from Unconstrained Video
PCA Flow
Efficient and Scalable Inference
Motion Blur in Layers
Facade Segmentation
Smooth Metric Learning
Robust PCA
3D Recognition
Object Detection
Regressing Humans
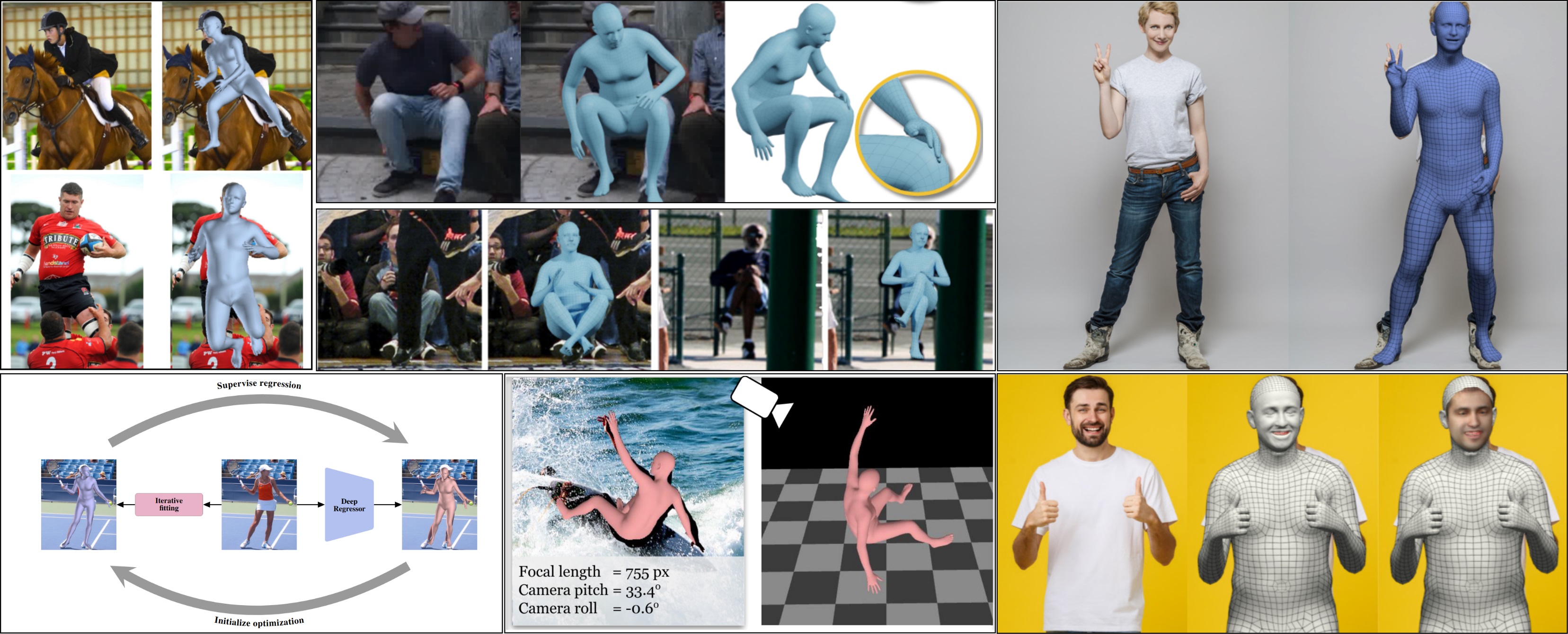
Estimating the full 3D human pose and shape (HPS) directly from RGB images enables markerless motion capture and provides the foundation for human behavior analysis. Classical top-down model fitting approaches have several limitations, they require pre-computed keypoints, which are difficult to obtain in complex scenarios and for bodies with occlusions, they are computationally slow (> 30 seconds per image), and these methods are easily trapped in local minima. In contrast, regression methods directly learn the mapping between image pixels and 3D body shape and pose using a deep neural network.
The first HPS regressor, HMR [![]() ], is trained using only a 2D joint reprojection error by exploiting an adversarial loss that encourages the model to produce SMPL parameters that are indistinguishable from real ones. VIBE [
], is trained using only a 2D joint reprojection error by exploiting an adversarial loss that encourages the model to produce SMPL parameters that are indistinguishable from real ones. VIBE [![]() ] generalizes HMR to videos by using a temporal discriminator learned from AMASS [
] generalizes HMR to videos by using a temporal discriminator learned from AMASS [![]() ]. SPIN [
]. SPIN [![]() ] uses the current regressor to initialize optimization-based fitting, which then serves as supervision to improve the regressor in a collaborative training framework.
] uses the current regressor to initialize optimization-based fitting, which then serves as supervision to improve the regressor in a collaborative training framework.
Our recent work builds on HMR and SPIN, addressing their limitations. PARE [![]() ] learns to predict body-part guided attention masks to increase robustness to partial occlusions by leveraging information from neighboring, non-occluded, body-parts. SPEC [
] learns to predict body-part guided attention masks to increase robustness to partial occlusions by leveraging information from neighboring, non-occluded, body-parts. SPEC [![]() ] learns a network to estimate a perspective camera from the input image, and uses this to regress more accurate 3D bodies. TUCH [
] learns a network to estimate a perspective camera from the input image, and uses this to regress more accurate 3D bodies. TUCH [![]() ] augments SPIN during training with 3D bodies that are obtained by exploiting discrete contacts during pose optimization, improving reconstruction performance for both self-contact and non-contact poses.
] augments SPIN during training with 3D bodies that are obtained by exploiting discrete contacts during pose optimization, improving reconstruction performance for both self-contact and non-contact poses.
Typical HPS regressors work in two stages: they detect the human and then regress the body in a cropped image. ROMP [![]() ] replaces this with a single stage by estimating the likelihood that a body is centered at any image pixel along with a map of SMPL parameters at every pixel. ROMP estimates multiple bodies simultaneously and in real time.
] replaces this with a single stage by estimating the likelihood that a body is centered at any image pixel along with a map of SMPL parameters at every pixel. ROMP estimates multiple bodies simultaneously and in real time.
Most methods regress SMPL parameters. ExPose [![]() ] estimates SMPL-X, including hand pose and facial expression, using body-part specific sub-networks to refine the hand and face parameters with body-driven attention. PIXIE [
] estimates SMPL-X, including hand pose and facial expression, using body-part specific sub-networks to refine the hand and face parameters with body-driven attention. PIXIE [![]() ] goes further, introducing a moderator that merges the features of different parts. PIXIE also increases realism by estimating gendered body shapes and detailed face shape.
] goes further, introducing a moderator that merges the features of different parts. PIXIE also increases realism by estimating gendered body shapes and detailed face shape.
Members













Publications