Enhanced Flexible Mold Lifetime for Roll‐to‐Roll Scaled‐Up Manufacturing of Adhesive Complex Microstructures
Bioinspired Microstructured Adhesives with Facile and Fast Switchability for Part Manipulation in Dry and Wet Conditions
Smart Materials for manipulation and actuation of small-scale structures
3D nanofabrication of various materials for advanced multifunctional microrobots
Liquid Crystal Mesophase of Supercooled Liquid Gallium And Eutectic Gallium–Indium
Machine Learning-Based Pull-off and Shear Optimal Adhesive Microstructures
Information entropy to detect order in self-organizing systems
Individual and collective manipulation of multifunctional bimodal droplets in three dimensions
Microrobot collectives with reconfigurable morphologies and functions
Self-organization in heterogeneous and non-reciprocal regime
Biomimetic Emulsion Systems
Giant Unilamellar Vesicles for Designing Cell-like Microrobots
Bioinspired self-assembled colloidal collectives drifting in three dimensions underwater
Adaptive wireless millirobotic locomotion into distal vasculature
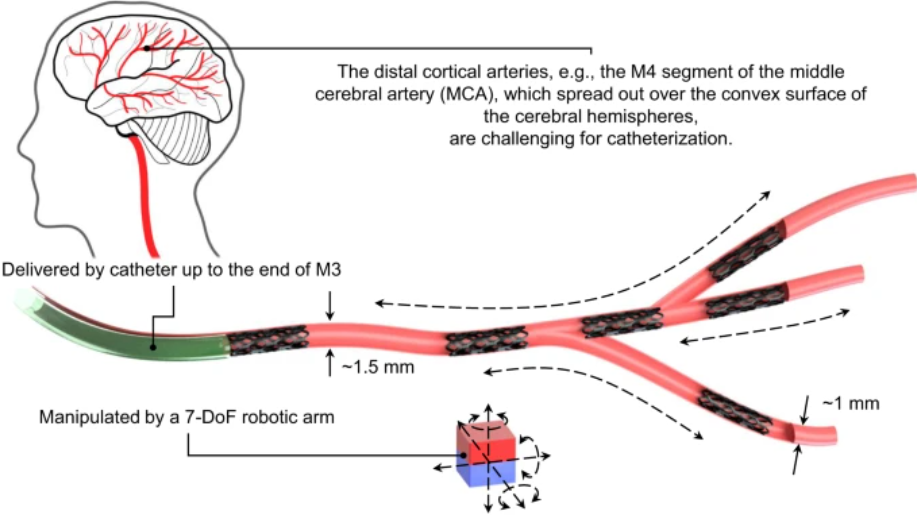
Microcatheters have enabled diverse minimally invasive endovascular operations and notable health benefits compared with open surgeries. However, with tortuous routes far from the arterial puncture site, the distal vascular regions remain challenging for safe catheter access. Therefore, we propose a wireless stent-shaped magnetic soft robot to be deployed, actively navigated, used for medical functions, and retrieved in the example M4 segment of the middle cerebral artery. We investigate shape-adaptively controlled locomotion in phantoms emulating the physiological conditions here, where the lumen diameter shrinks from 1.5 mm to 1 mm, the radius of curvature of the tortuous lumen gets as small as 3 mm, the lumen bifurcation angle goes up to 120°, and the pulsatile flow speed reaches up to 26 cm/s. The robot can also withstand the flow when the magnetic actuation is turned off. These locomotion capabilities are confirmed in porcine arteries ex vivo. Furthermore, variants of the robot could release the tissue plasminogen activator on-demand locally for thrombolysis and function as flow diverters, initiating promising therapies towards acute ischemic stroke, aneurysm, arteriovenous malformation, dural arteriovenous fistulas, and brain tumors. These functions should facilitate the robot’s usage in new distal endovascular operations.
Members









Publications