Enhanced Flexible Mold Lifetime for Roll‐to‐Roll Scaled‐Up Manufacturing of Adhesive Complex Microstructures
Bioinspired Microstructured Adhesives with Facile and Fast Switchability for Part Manipulation in Dry and Wet Conditions
Smart Materials for manipulation and actuation of small-scale structures
3D nanofabrication of various materials for advanced multifunctional microrobots
Liquid Crystal Mesophase of Supercooled Liquid Gallium And Eutectic Gallium–Indium
Machine Learning-Based Pull-off and Shear Optimal Adhesive Microstructures
Information entropy to detect order in self-organizing systems
Individual and collective manipulation of multifunctional bimodal droplets in three dimensions
Microrobot collectives with reconfigurable morphologies and functions
Self-organization in heterogeneous and non-reciprocal regime
Biomimetic Emulsion Systems
Giant Unilamellar Vesicles for Designing Cell-like Microrobots
Bioinspired self-assembled colloidal collectives drifting in three dimensions underwater
Individual and collective manipulation of multifunctional bimodal droplets in three dimensions
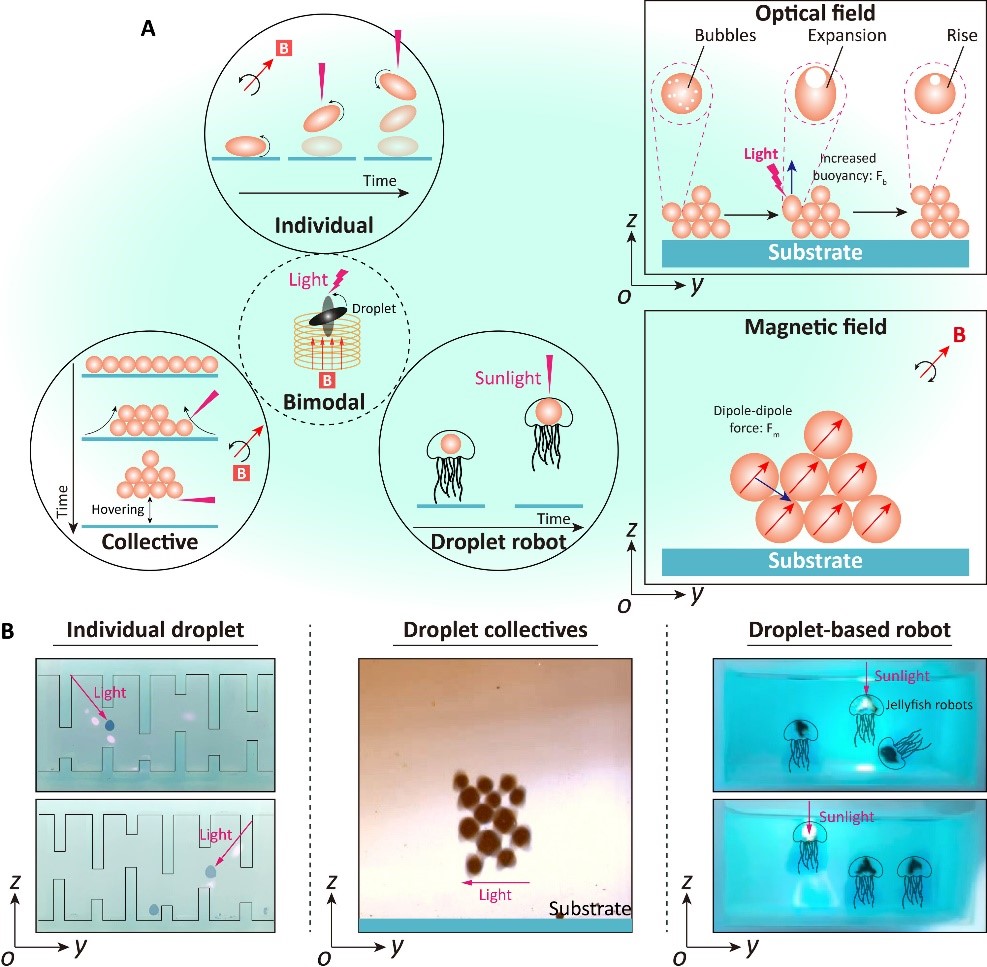
Spatiotemporally controllable droplet manipulation is vital across numerous applications, particularly in miniature droplet robots known for their exceptional deformability. Despite notable advancements, current droplet control methods are predominantly limited to two-dimensional (2D) deformation and motion of an individual droplet, with minimal exploration of 3D manipulation and collective droplet behaviors. Here, we introduce a bimodal actuation strategy, merging magnetic and optical fields, for remote and programmable 3D guidance of individual ferrofluidic droplets and droplet collectives [![]() ]. The magnetic field induces a magnetic dipole force, prompting the formation of droplet collectives. Simultaneously, the optical field triggers isothermal changes in interfacial tension through Marangoni flows, enhancing buoyancy and facilitating 3D movements of individual and collective droplets. Moreover, these droplets can function autonomously as soft robots, capable of transporting objects. Alternatively, when combined with a hydrogel shell, they assemble into jellyfish-like robots, driven by sunlight. These findings present an efficient strategy for droplet manipulation, broadening the capabilities of droplet-based robotics.
]. The magnetic field induces a magnetic dipole force, prompting the formation of droplet collectives. Simultaneously, the optical field triggers isothermal changes in interfacial tension through Marangoni flows, enhancing buoyancy and facilitating 3D movements of individual and collective droplets. Moreover, these droplets can function autonomously as soft robots, capable of transporting objects. Alternatively, when combined with a hydrogel shell, they assemble into jellyfish-like robots, driven by sunlight. These findings present an efficient strategy for droplet manipulation, broadening the capabilities of droplet-based robotics.
Members

Publications