Enhanced Flexible Mold Lifetime for Roll‐to‐Roll Scaled‐Up Manufacturing of Adhesive Complex Microstructures
Bioinspired Microstructured Adhesives with Facile and Fast Switchability for Part Manipulation in Dry and Wet Conditions
Smart Materials for manipulation and actuation of small-scale structures
3D nanofabrication of various materials for advanced multifunctional microrobots
Liquid Crystal Mesophase of Supercooled Liquid Gallium And Eutectic Gallium–Indium
Machine Learning-Based Pull-off and Shear Optimal Adhesive Microstructures
Information entropy to detect order in self-organizing systems
Individual and collective manipulation of multifunctional bimodal droplets in three dimensions
Microrobot collectives with reconfigurable morphologies and functions
Self-organization in heterogeneous and non-reciprocal regime
Biomimetic Emulsion Systems
Giant Unilamellar Vesicles for Designing Cell-like Microrobots
Bioinspired self-assembled colloidal collectives drifting in three dimensions underwater
Machine Learning-Based Pull-off and Shear Optimal Adhesive Microstructures
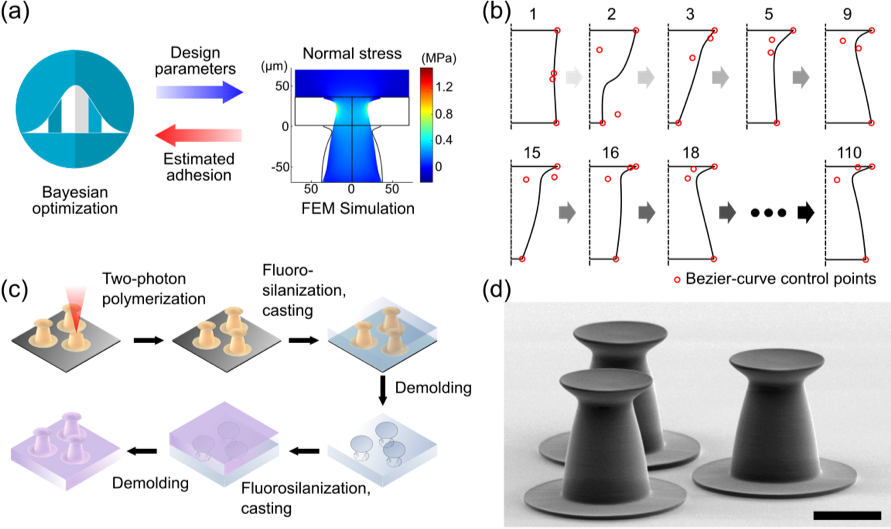
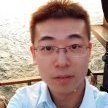
Bioinspired fibrillar structures are promising for a wide range of disruptive adhesive applications. Especially micro/nano fibrillar structures on gecko toes can have strong and controllable normal and shear adhesion on a wide range of surfaces with residual-free, repeatable, self-cleaning, and other unique features. Synthetic dry fibrillar adhesives inspired by such biological fibrils are optimized in different aspects to increase their performance. Previous fibril designs for pull-off and shear optimization are limited by predefined standard shapes in a narrow range primarily based on human intuition, which restricts their maximum performance. This project combines machine learning-based optimization and finite-element-method-based simulations to find pull-off-optimized[![]() ] and shear-optimized[
] and shear-optimized[![]() ] adhesive microstructure designs automatically. In addition, fabrication limitations are integrated into the simulations to have more experimentally relevant results. The computationally discovered pull-off and shear-optimized structures are fabricated, experimentally validated, and compared with the simulations. The results show that the computed pull-off and shear-optimized microstructures perform better than the predefined standard fibril designs. This design optimization method can be used in future real-world pull-off and shear-based gripping or nonslip surface applications, such as robotic pick-and-place grippers, climbing robots, gloves, electronic devices, and medical and wearable devices.
] adhesive microstructure designs automatically. In addition, fabrication limitations are integrated into the simulations to have more experimentally relevant results. The computationally discovered pull-off and shear-optimized structures are fabricated, experimentally validated, and compared with the simulations. The results show that the computed pull-off and shear-optimized microstructures perform better than the predefined standard fibril designs. This design optimization method can be used in future real-world pull-off and shear-based gripping or nonslip surface applications, such as robotic pick-and-place grippers, climbing robots, gloves, electronic devices, and medical and wearable devices.
Members




Publications