Enhanced Flexible Mold Lifetime for Roll‐to‐Roll Scaled‐Up Manufacturing of Adhesive Complex Microstructures
Bioinspired Microstructured Adhesives with Facile and Fast Switchability for Part Manipulation in Dry and Wet Conditions
Smart Materials for manipulation and actuation of small-scale structures
3D nanofabrication of various materials for advanced multifunctional microrobots
Liquid Crystal Mesophase of Supercooled Liquid Gallium And Eutectic Gallium–Indium
Machine Learning-Based Pull-off and Shear Optimal Adhesive Microstructures
Information entropy to detect order in self-organizing systems
Individual and collective manipulation of multifunctional bimodal droplets in three dimensions
Microrobot collectives with reconfigurable morphologies and functions
Self-organization in heterogeneous and non-reciprocal regime
Biomimetic Emulsion Systems
Giant Unilamellar Vesicles for Designing Cell-like Microrobots
Bioinspired self-assembled colloidal collectives drifting in three dimensions underwater
Magnetic Putty as a Reconfigurable, Recyclable, and Accessible Soft Robotic Material
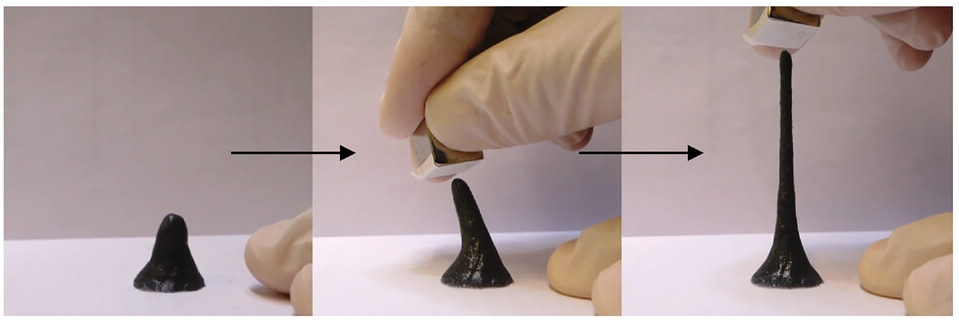
Magnetically hard materials are widely used to build soft magnetic robots, providing large magnetic force/torque and macrodomain programmability. However, their high magnetic coercivity often presents practical challenges when attempting to reconfigure magnetization patterns, requiring a large magnetic field or heating. This project introduces magnetic putty as a magnetically hard and soft material with large remanence and low coercivity. It is shown that the magnetization of magnetic putty can be easily reoriented with maximum magnitude using an external field that is only one-tenth of its coercivity. Additionally, magnetic putty is a malleable, autonomous, self-healing material that can be recycled and repurposed. The authors anticipate magnetic putty could provide a versatile and accessible tool for various magnetic robotics applications for fast prototyping and explorations for research and educational purposes.
Members


Publications