Enhanced Flexible Mold Lifetime for Roll‐to‐Roll Scaled‐Up Manufacturing of Adhesive Complex Microstructures
Bioinspired Microstructured Adhesives with Facile and Fast Switchability for Part Manipulation in Dry and Wet Conditions
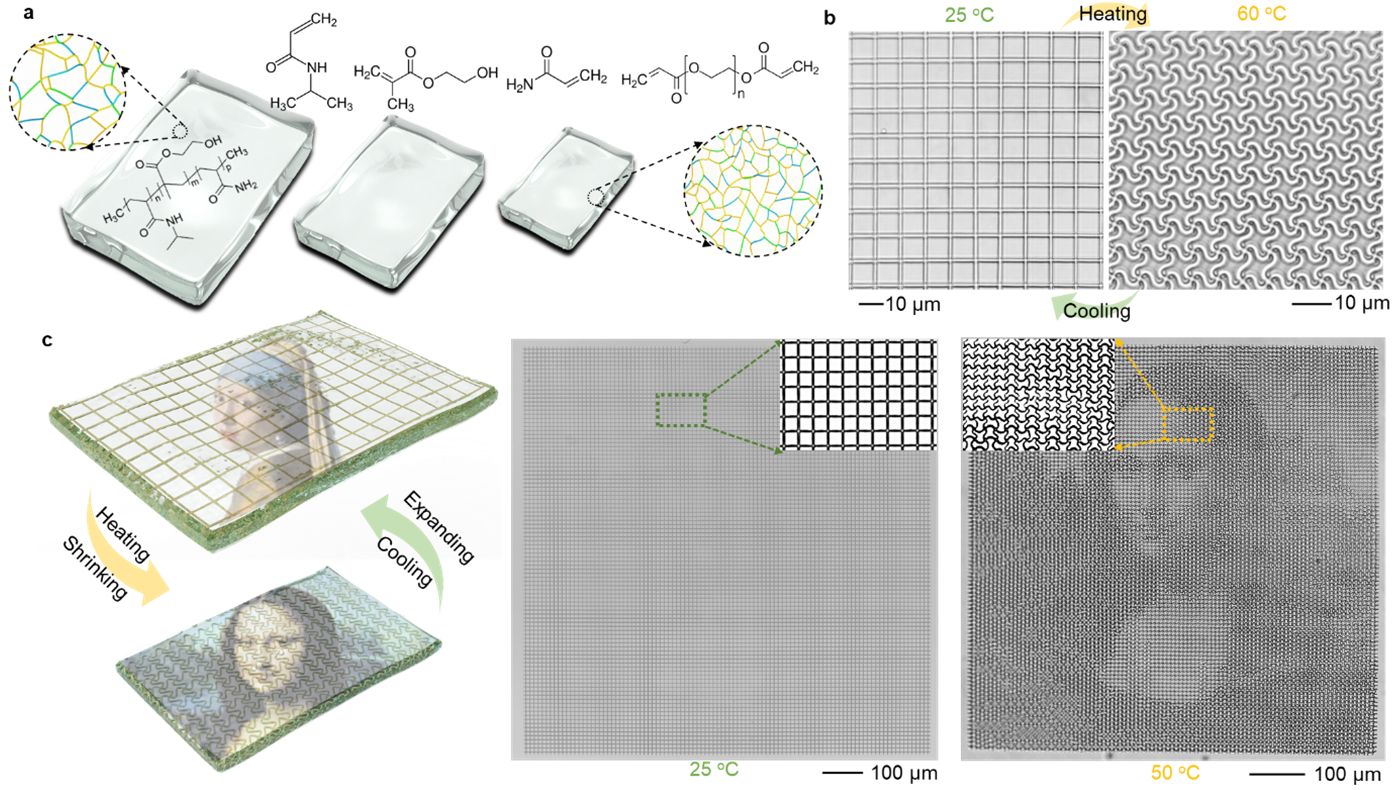
Smart Materials for manipulation and actuation of small-scale structures
3D nanofabrication of various materials for advanced multifunctional microrobots
Liquid Crystal Mesophase of Supercooled Liquid Gallium And Eutectic Gallium–Indium
Machine Learning-Based Pull-off and Shear Optimal Adhesive Microstructures
Information entropy to detect order in self-organizing systems
Individual and collective manipulation of multifunctional bimodal droplets in three dimensions
Microrobot collectives with reconfigurable morphologies and functions
Self-organization in heterogeneous and non-reciprocal regime
Biomimetic Emulsion Systems
Giant Unilamellar Vesicles for Designing Cell-like Microrobots
Bioinspired self-assembled colloidal collectives drifting in three dimensions underwater
Physical Intelligence
As one of the core research questions of our department, we aim to understand the underlying principles of physical intelligence (PI) at milli- and micrometer length scales, and realize advanced PI capabilities on small-scale mobile robots to overcome the limitations on the on-board computation and powering capabilities at small lengths. Our approach to create advanced PI capabilities in a miniature robot include Encoding autonomous self-X (e.g., self-adaptation, self.healing, self-propulsion, etc) and multi-X (e.g., multifunction, multistability, multimodality, multiphysics etc) capabilites in the robot body, where the physical design of the body can induce multiple functions or behaviors by integrating passive or active materials, structures or mechanisms. To reduce the need for computation, we also encode other advanced PI capabilites, such as logic operations, memory, computation, decision making, reconfigurability, physical (re)programmability, taxis and collective behavior.
We design intelligent physical structures by utilising stimuli-responsive or multifunctional synthetic polymers, metals, ceramics, biomaterials (e.g., gelatin, proteins, cells, tissues), and micro/nanomaterials-based composites (e.g., ferrofluids, magneto/electrorheological fluids, micro/nanoscale particle-filled polymers). Our group has pioneered elastomertic microfiber arrays-based adhesives and gripping materials inspired by biological micro-hairs on the body of animals and plants.These microfibers are useful for reversible, fast, energy-efficient, compact and mechanically controlled adhesion and friction on a wide range of surfaces. Prof. Sitti founded a startup (nanoGriptech, Inc.) in 2012 in USA, which has commercialized such gecko-inspired adhesives for a wide range of industrial and consumer applications with a brand name Setex®. Our group has also pioneered the self-healing and self-propelling soft actuators and robot materials, liquid crystal elastomers, hydrogels and other stimuli-responsive and programmable PI materials (with self-X and multi-X capabilites) on the robot bodies, liquid Gallium droplets behaving as a smart switchable phase-changing adhesive surfaces, and novel techniques for 3D-printing of micro and nanostructures of various materials.