Enhanced Flexible Mold Lifetime for Roll‐to‐Roll Scaled‐Up Manufacturing of Adhesive Complex Microstructures
Bioinspired Microstructured Adhesives with Facile and Fast Switchability for Part Manipulation in Dry and Wet Conditions
Smart Materials for manipulation and actuation of small-scale structures
3D nanofabrication of various materials for advanced multifunctional microrobots
Liquid Crystal Mesophase of Supercooled Liquid Gallium And Eutectic Gallium–Indium
Machine Learning-Based Pull-off and Shear Optimal Adhesive Microstructures
Information entropy to detect order in self-organizing systems
Individual and collective manipulation of multifunctional bimodal droplets in three dimensions
Microrobot collectives with reconfigurable morphologies and functions
Self-organization in heterogeneous and non-reciprocal regime
Biomimetic Emulsion Systems
Giant Unilamellar Vesicles for Designing Cell-like Microrobots
Bioinspired self-assembled colloidal collectives drifting in three dimensions underwater
Wireless flow-powered miniature robot capable of traversing tubular structures
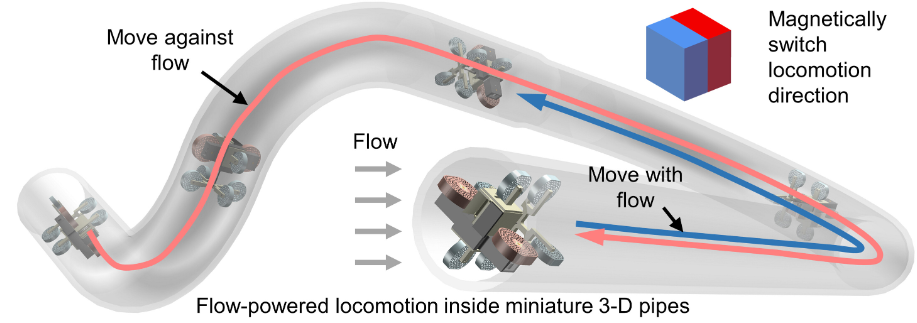
Wireless millimeter-scale robots capable of navigating through fluid-flowing tubular structures hold substantial potential for inspection, maintenance, or repair use in nuclear, industrial, and medical applications. However, prevalent reliance on external powering constrains these robots’ operational range and applicable environments. Alternatives with onboard powering must trade off size, functionality, and operation duration. Here, we propose a wireless millimeter-scale wheeled robot capable of using environmental flows to power and actuate its long-distance locomotion through complex pipelines. The flow-powering module can convert flow energy into mechanical energy, achieving an impeller speed of up to 9595 revolutions per minute, accompanied by an output power density of 11.7 watts per cubic meter and an efficiency of 33.7%. A miniature gearbox module can further transmit the converted mechanical energy into the robot’s locomotion system, allowing the robot to move against water flow at an average rate of up to 1.05 meters per second. The robot’s motion status (moving against/with flow or pausing) can be switched using an external magnetic field or an onboard mechanical regulator, contingent on different proposed control designs. In addition, we designed kirigami-based soft wheels for adaptive locomotion. The robot can move against flows of various substances within pipes featuring complex geometries and diverse materials. Solely powered by flow, the robot can transport cylindrical payloads with a diameter of up to 55% of the pipe’s diameter and carry devices such as an endoscopic camera for pipeline inspection, a wireless temperature sensor for environmental temperature monitoring, and a leak-stopper shell for infrastructure maintenance.
Members




Publications