Enhanced Flexible Mold Lifetime for Roll‐to‐Roll Scaled‐Up Manufacturing of Adhesive Complex Microstructures
Bioinspired Microstructured Adhesives with Facile and Fast Switchability for Part Manipulation in Dry and Wet Conditions
Smart Materials for manipulation and actuation of small-scale structures
3D nanofabrication of various materials for advanced multifunctional microrobots
Liquid Crystal Mesophase of Supercooled Liquid Gallium And Eutectic Gallium–Indium
Machine Learning-Based Pull-off and Shear Optimal Adhesive Microstructures
Information entropy to detect order in self-organizing systems
Individual and collective manipulation of multifunctional bimodal droplets in three dimensions
Microrobot collectives with reconfigurable morphologies and functions
Self-organization in heterogeneous and non-reciprocal regime
Biomimetic Emulsion Systems
Giant Unilamellar Vesicles for Designing Cell-like Microrobots
Bioinspired self-assembled colloidal collectives drifting in three dimensions underwater
Microrobot Collectives
Single mobile microrobots have limited capabilities, such as the maximum cargo volume delivered to a target location and the maximum external force output, and are impossible or very hard to image and track using medical imaging modalities. Therefore, hundreds and even thousands of microrobot collectives are essential to design, navigate, control, and implement for diverse desired functions. However, current synthetic microrobots do not have on-board autonomy individually like in macroscale robot collectives. Therefore, new microrobot collective design and control methods need to be developed.
Our main approach for creating synthetic microrobot collectives is not to control each microrobot individually, but to control the local physical interactions among the microrobots through a global control input, which could enable their programmable self-organization, navigation and functions. Such approach entails design of local attractive/repulsive interaction forces (e.g., magnetic, capillary, electrostatic and hydrodynamic) among the robots to have programmable dynamic equilibrium states with different global actuation inputs. Such cohesive robot collectives can be navigated precisely using controlled external forces (e.g., magnetic, acoustic or light), while being tracked by medical imaging modalities.
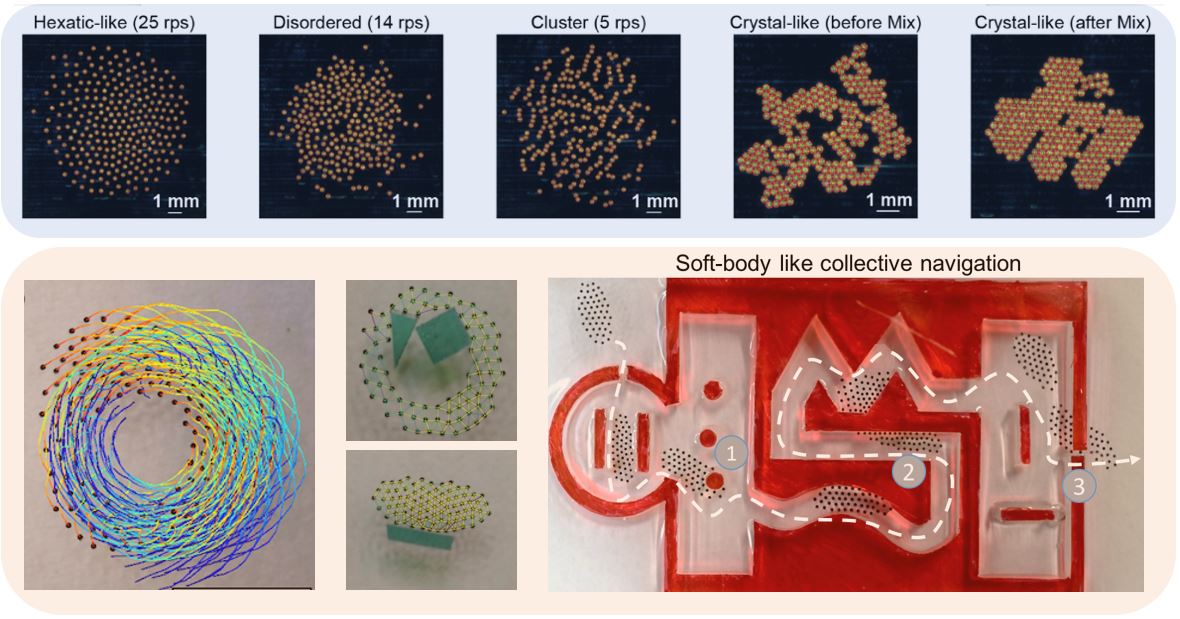
We are exploring magnetic microrobot collectives to understand how to design and control such collectives for different tasks in complex environments. We have designed spinning magnetic micro-disks, which self-organize due to intricate balance between attractive and repulsive pairwise interactions.. The local interactions are tuned via a uniform magnetic field. Other systems include collectives of colloidal particles that cand rift in 3 dimentions (3D), oil droplets in water that self-propel or synthetic systems that mimic a cell-membrane. The globally controlled local interactions induce different collective behaviours and robotic funtions of these systems.