Enhanced Flexible Mold Lifetime for Roll‐to‐Roll Scaled‐Up Manufacturing of Adhesive Complex Microstructures
Bioinspired Microstructured Adhesives with Facile and Fast Switchability for Part Manipulation in Dry and Wet Conditions
Smart Materials for manipulation and actuation of small-scale structures
3D nanofabrication of various materials for advanced multifunctional microrobots
Liquid Crystal Mesophase of Supercooled Liquid Gallium And Eutectic Gallium–Indium
Machine Learning-Based Pull-off and Shear Optimal Adhesive Microstructures
Information entropy to detect order in self-organizing systems
Individual and collective manipulation of multifunctional bimodal droplets in three dimensions
Microrobot collectives with reconfigurable morphologies and functions
Self-organization in heterogeneous and non-reciprocal regime
Biomimetic Emulsion Systems
Giant Unilamellar Vesicles for Designing Cell-like Microrobots
Bioinspired self-assembled colloidal collectives drifting in three dimensions underwater
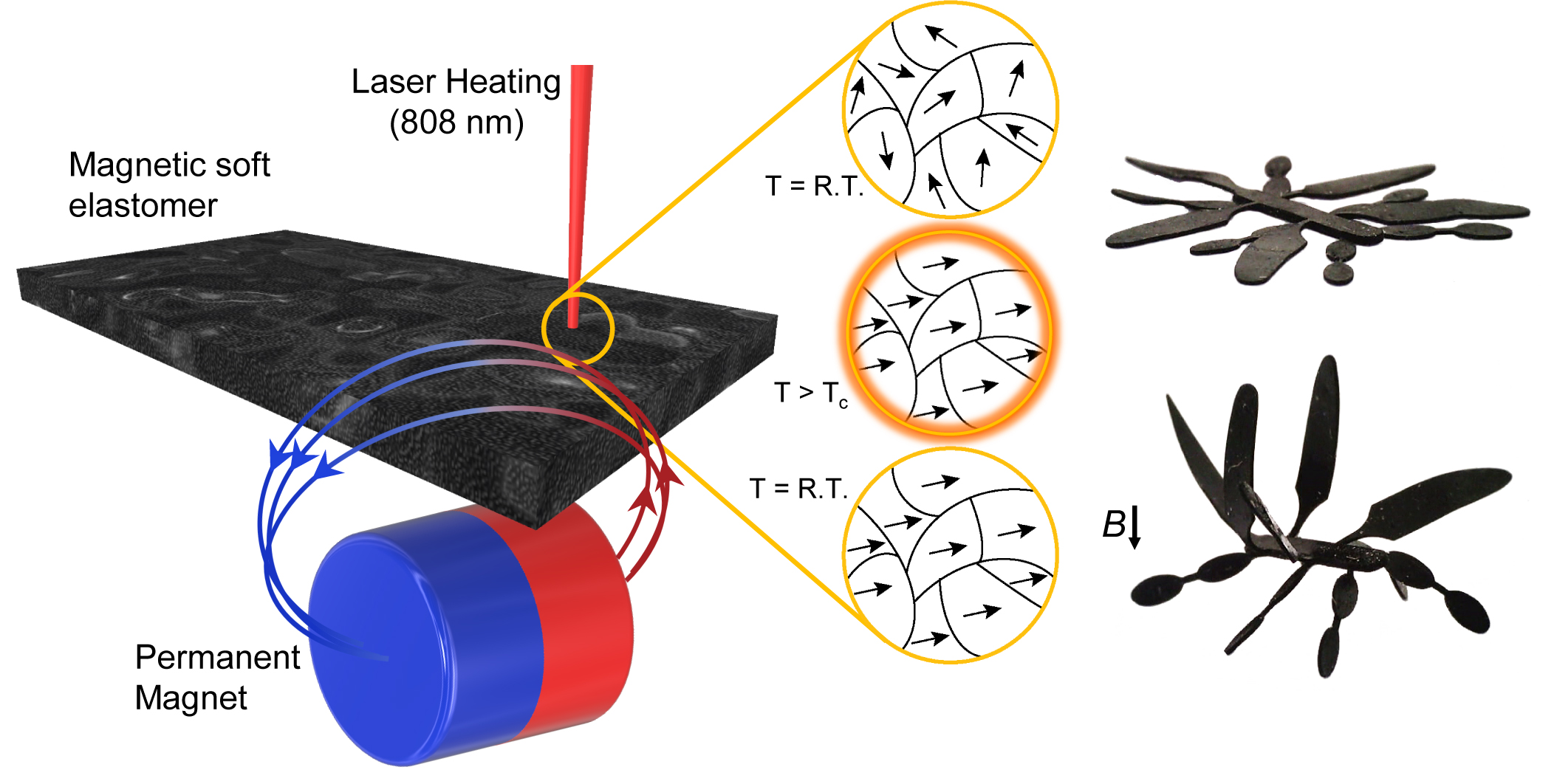
Heat-assisted reprogramming of magnetic soft millirobots
Shape-changing soft matter has generated significant interest for a diverse range of applications spanning from implementable and wearable medical devices to soft robots. Magnetically responsive soft matter with programmable shape deformation are particularly attractive, due to their rapid and remote actuation, for applications in closed and confined spaces, such as the human body. Prominent magnetic programming approaches are inherently coupled to sequential fabrication processes, preventing reprogrammability and high-throughput programming. This project aims to achieve non-invasive encoding of reprogrammable shape-changing instructions, and simultaneous 3D, discrete magnetization of complex structures at high spatiotemporal resolution and throughput.
We introduce a versatile strategy for encoding reprogrammable shape-morphing instructions into magnetic soft machines in a high-throughput fashion [![]() ]. Our approach is enabled by heat-assisted magnetic programming of soft materials by heating above the Curie temperature of the ferromagnetic particles and reorienting their magnetic domains with external magnetic fields during cooling. We demonstrate discrete, three-dimensional, and reprogrammable magnetization with high spatial resolution (~38 µm). Taking advantage of magnetic reprogrammability, reconfigurable mechanical behavior of an auxetic metamaterial structure, tunable locomotion patterns of a quadrupedal soft robot, and adaptive grasping behavior of a soft gripper are presented. Heat-assisted magnetic programming further enables high-throughput magnetic programming via contact transfer of distributed magnetization profiles from a magnetic master (~10 samples/minute using a single master). The magnetic (re)programming approach described here establishes a rich design space and mass-manufacturing capability for development of multi-scale and reprogrammable soft machines.
]. Our approach is enabled by heat-assisted magnetic programming of soft materials by heating above the Curie temperature of the ferromagnetic particles and reorienting their magnetic domains with external magnetic fields during cooling. We demonstrate discrete, three-dimensional, and reprogrammable magnetization with high spatial resolution (~38 µm). Taking advantage of magnetic reprogrammability, reconfigurable mechanical behavior of an auxetic metamaterial structure, tunable locomotion patterns of a quadrupedal soft robot, and adaptive grasping behavior of a soft gripper are presented. Heat-assisted magnetic programming further enables high-throughput magnetic programming via contact transfer of distributed magnetization profiles from a magnetic master (~10 samples/minute using a single master). The magnetic (re)programming approach described here establishes a rich design space and mass-manufacturing capability for development of multi-scale and reprogrammable soft machines.

Members




Publications