Enhanced Flexible Mold Lifetime for Roll‐to‐Roll Scaled‐Up Manufacturing of Adhesive Complex Microstructures
Bioinspired Microstructured Adhesives with Facile and Fast Switchability for Part Manipulation in Dry and Wet Conditions
Smart Materials for manipulation and actuation of small-scale structures
3D nanofabrication of various materials for advanced multifunctional microrobots
Liquid Crystal Mesophase of Supercooled Liquid Gallium And Eutectic Gallium–Indium
Machine Learning-Based Pull-off and Shear Optimal Adhesive Microstructures
Information entropy to detect order in self-organizing systems
Individual and collective manipulation of multifunctional bimodal droplets in three dimensions
Microrobot collectives with reconfigurable morphologies and functions
Self-organization in heterogeneous and non-reciprocal regime
Biomimetic Emulsion Systems
Giant Unilamellar Vesicles for Designing Cell-like Microrobots
Bioinspired self-assembled colloidal collectives drifting in three dimensions underwater
Human lower leg biomechanics with EcoWalker robot
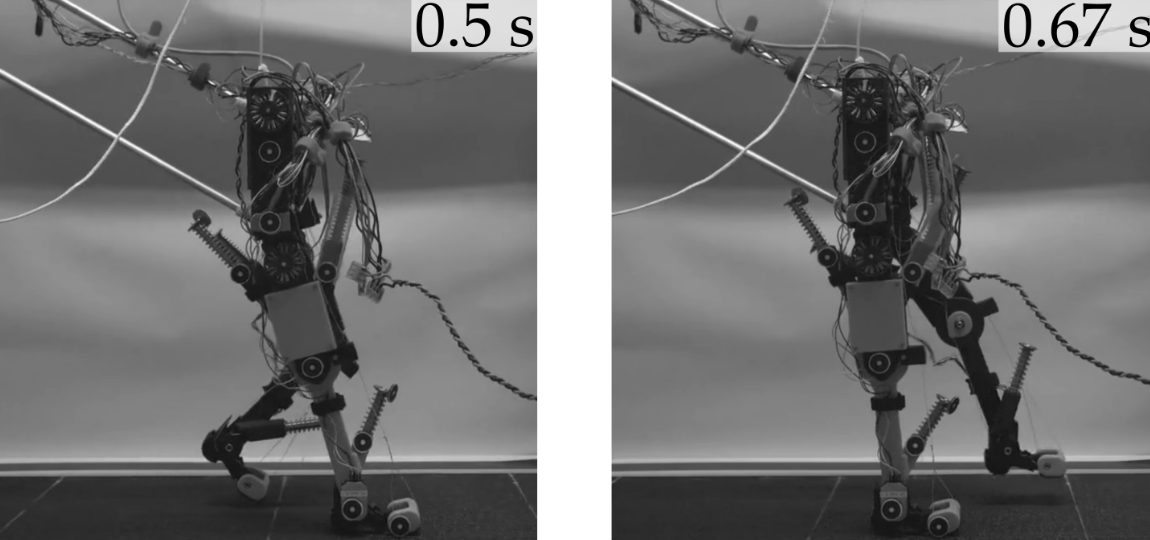
We developed a 0.49 m tall, about 2kg anthropomorphic bipedal robot with Soleus and Gastrocnemius muscle-tendon units represented by linear springs, acting as mono- and biarticular elastic structures around the robot’s ankle and knee joints. We found that the Soleus spring-tendon modulates the robot’s speed and energy efficiency likely by ankle power amplification. The Gastrocnemius spring-tendon changes the movement coordination between ankle and knee joints during push-off [![]() ].
].
Video
Members



Publications